
Open Methods: Newton Raphson Method
The Method
The Newton-Raphson method is one of the most used methods of all root-finding methods. The reason for its success is that it converges very fast in most cases. In addition, it can be extended quite easily to multi-variable equations. To find the root of the equation  , the Newton-Raphson method depends on the Taylor Series Expansion of the function around the estimate
, the Newton-Raphson method depends on the Taylor Series Expansion of the function around the estimate  to find a better estimate
to find a better estimate  :
:
![\[ f(x_{i+1})=f(x_i)+f'(x_i)(x_{i+1}-x_i)+\mathcal O (h^2) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-465a59b53d1d675557b89c2d73ba00bb_l3.png "Rendered by QuickLaTeX.com")
where is the estimate of the root after iteration  and is the estimate at iteration
and is the estimate at iteration  . Assuming
. Assuming  and rearranging:
and rearranging:
![\[ x_{i+1}\approx x_i-\frac{f(x_i)}{f'(x_i)} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-45f1245669c72882ca47f5c4bfaf9ae8_l3.png "Rendered by QuickLaTeX.com")
The procedure is as follows. Setting an initial guess  , tolerance
, tolerance  , and maximum number of iterations
, and maximum number of iterations  :
:
At iteration , calculate  and
and  . If
. If  or if
or if  , stop the procedure. Otherwise repeat.
, stop the procedure. Otherwise repeat.
Note: unlike the previous methods, the Newton-Raphson method relies on calculating the first derivative of the function  . This makes the procedure very fast, however, it has two disadvantages. The first is that this procedure doesn’t work if the function is not differentiable. Second, the inverse
. This makes the procedure very fast, however, it has two disadvantages. The first is that this procedure doesn’t work if the function is not differentiable. Second, the inverse  can be slow to calculate when dealing with multi-variable equations.
can be slow to calculate when dealing with multi-variable equations.
Example
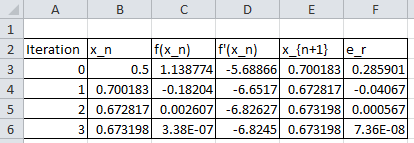
As an example, let’s consider the function  . The derivative of
. The derivative of  is
is  . Setting the maximum number of iterations
. Setting the maximum number of iterations  ,
,  ,
,  , the following is the Microsoft Excel table produced:
, the following is the Microsoft Excel table produced:
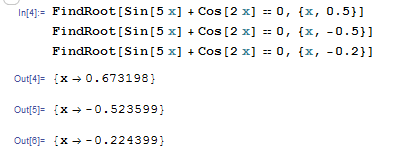
Mathematica has a built-in algorithm for the Newton-Raphson method. The function “FindRoot[lhs==rhs,{x,x0}]” applies the Newton-Raphson method with the initial guess being “x0”. The following is a screenshot of the input and output of the built-in function evaluating the roots based on three initial guesses.
Alternatively, a Mathematica code can be written to implement the Newton-Raphson method with the following output for three different initial guesses:

Clear[x]
f[x_] := Sin[5 x] + Cos[2 x]
fp = D[f[x], x]
xtable = {-0.25};
er = {1};
es = 0.0005;
MaxIter = 100;
i = 1;
While[And[i <= MaxIter, Abs[er[[i]]] > es], xnew = xtable[[i]] - (f[xtable[[i]]]/fp /. x -> xtable[[i]]); xtable = Append[xtable, xnew]; ernew = (xnew - xtable[[i]])/xnew; er = Append[er, ernew]; i++];
T = Length[xtable];
SolutionTable = Table[{i - 1, xtable[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
T // MatrixForm
import sympy as sp
import pandas as pd
def f(x): return sp.sin(5*x) + sp.cos(2*x)
x = sp.symbols('x')
fp = f(x).diff(x)
xtable = [-0.25]
er = [1]
es = 0.0005
MaxIter = 100
i = 0
while i <= MaxIter and abs(er[i]) > es:
xnew = xtable[i] - (f(xtable[i])/fp.subs(x,xtable[i]))
xtable.append(xnew)
ernew = (xnew - xtable[i])/xnew
er.append(ernew)
i+=1
SolutionTable = [[i, xtable[i], er[i]] for i in range(len(xtable))];
sol = pd.DataFrame(SolutionTable,columns=["Iteration", "x", "er"])
display(sol)
# Scipy's root function
import numpy as np
from scipy.optimize import root
def f(x):
return np.sin(5*x) + np.cos(2*x)
sol = root(f,[0])
print("Scipy's Root: ",sol.x)
The following MATLAB code runs the Newton-Raphson method to find the root of a function with derivative  and initial guess . The value of the estimate and approximate relative error at each iteration is displayed in the command window. Additionally, two plots are produced to visualize how the iterations and the errors progress. You need to pass the function f(x) and its derivative df(x) to the newton-raphson method along with the initial guess as newtonraphson(@(x) f(x), @(x) df(x), x0). For example, try newtonraphson(@(x) sin(5.*x)+cos(2.*x), @(x) 5.*cos(5.*x)-2.*sin(2.*x),0.4)
and initial guess . The value of the estimate and approximate relative error at each iteration is displayed in the command window. Additionally, two plots are produced to visualize how the iterations and the errors progress. You need to pass the function f(x) and its derivative df(x) to the newton-raphson method along with the initial guess as newtonraphson(@(x) f(x), @(x) df(x), x0). For example, try newtonraphson(@(x) sin(5.*x)+cos(2.*x), @(x) 5.*cos(5.*x)-2.*sin(2.*x),0.4)
Analysis of Convergence of the Newton-Raphson Method
The error in the Newton-Raphson Method can be roughly estimated as follows. The estimate is related to the previous estimate using the equation:
![\[ x_{i+1}=x_i-\frac{f(x_i)}{f'(x_i)}\Rightarrow 0=f(x_i)+f'(x_i)(x_{i+1}-x_i) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a34a087de7a0e2214fb55cbd90c133b4_l3.png "Rendered by QuickLaTeX.com")
Additionally, using Taylor’s theorem, and if  is the true root with we have:
is the true root with we have:
![\[ f(x_t)=0=f(x_i)+f'(x_i)(x_t-x_i)+\frac{f''(\xi)}{2!}{(x_t-x_i)^2} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e3e01d6393ef501eebb9194126783bd8_l3.png "Rendered by QuickLaTeX.com")
for some  in the interval between and . Subtracting the above two equations yields:
in the interval between and . Subtracting the above two equations yields:
![\[ 0=f'(x_i)(x_t-x_{i+1})+\frac{f''(\xi)}{2!}{(x_t-x_i)^2} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5753c49f1003047ba2ebe7746e564358_l3.png "Rendered by QuickLaTeX.com")
 and
and  then:
then: (1) 
If the method is converging, we have  and
and  therefore:
therefore:
![\[ E_{i+1}\propto E_i^2 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-dc4fcec3bfcf3ef509dc5d48766264e4_l3.png "Rendered by QuickLaTeX.com")
Therefore, the error is squared after each iteration, i.e., the number of correct decimal places approximately doubles with each iteration. This behaviour is called quadratic convergence. Look at the tables in the Newton-Raphson example above and compare the relative error after each step!
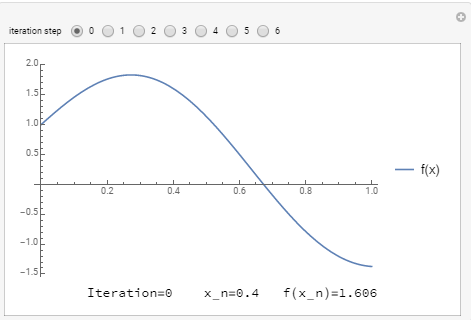
The following tool can be used to visualize how the Newton-Raphson method works. Using the slope  , the difference
, the difference  can be calculated and thus, the value of the new estimate can be computed accordingly. Use the slider to see how fast the method converges to the true solution using ,
can be calculated and thus, the value of the new estimate can be computed accordingly. Use the slider to see how fast the method converges to the true solution using ,  , and solving for the root of
, and solving for the root of ![f(x)=\sin[5x]+\cos[2x]=0](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ce12fca1e8554b4c99099a0b20f0d1f7_l3.png "Rendered by QuickLaTeX.com") .
.
Manipulate[
f[x_] := Sin[5 x] + Cos[2 x];
fp = D[f[x], x];
xtable = {0.4};
er = {1};
es = 0.0005;
MaxIter = 100;
i = 1;
While[And[i <= MaxIter, Abs[er[[i]]] > es], xnew = xtable[[i]] - (f[xtable[[i]]]/fp /. x -> xtable[[i]]); xtable = Append[xtable, xnew]; ernew = (xnew - xtable[[i]])/xnew; er = Append[er, ernew]; i++];
T = Length[xtable];
SolutionTable = Table[{i - 1, xtable[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
LineTable1 = Table[{{T[[i, 2]], 0}, {T[[i, 2]], f[T[[i, 2]]]}, {T[[i + 1, 2]],0}}, {i, 2, n - 1}];
Grid[{{Plot[f[x], {x, 0, 1}, PlotLegends -> {"f(x)"}, ImageSize -> Medium, Epilog -> {Dashed, Line[LineTable1]}]}, {Row[{"Iteration=", n - 2, " x_n=", T[[n, 2]], " f(x_n)=", f[T[[n, 2]]]}]}}], {n, 2, 7, 1}]
import numpy as np
import sympy as sp
import matplotlib.pyplot as plt
from ipywidgets.widgets import interact
def f(x): return sp.sin(5*x) + sp.cos(2*x)
x = sp.symbols('x')
fp = f(x).diff(x)
@interact(n=(2,7,1))
def update(n=2):
xtable = [0.4]
er = [1]
es = 0.0005
MaxIter = 100
i = 0
while i <= MaxIter and abs(er[i]) > es:
xnew = xtable[i] - (f(xtable[i])/fp.subs(x,xtable[i]))
xtable.append(xnew)
ernew = (xnew - xtable[i])/xnew
er.append(ernew)
i+=1
SolutionTable = [[i - 1, xtable[i], er[i]] for i in range(len(xtable))]
LineTable = [[],[]]
for i in range(n-2):
LineTable[0].extend([SolutionTable[i][1], SolutionTable[i][1], SolutionTable[i + 1][1]])
LineTable[1].extend([0, f(SolutionTable[i][1]), 0])
x_val = np.arange(0,1.1,0.03)
y_val = np.sin(5*x_val) + np.cos(2*x_val)
plt.plot(x_val,y_val, label="f(x)")
plt.plot(LineTable[0],LineTable[1],'k--')
plt.legend(); plt.grid(); plt.show()
print("Iteration =",n-2," x_n =",round(SolutionTable[n-2][1],5)," f(x_n) =",f(SolutionTable[n-2][1]))
Depending on the shape of the function and the initial guess, the Newton-Raphson method can get stuck around the locations of oscillations of the function. The tool below visualizes the algorithm when trying to find the root of  with an initial guess of
with an initial guess of  . It takes 33 iterations before reaching convergence.
. It takes 33 iterations before reaching convergence.
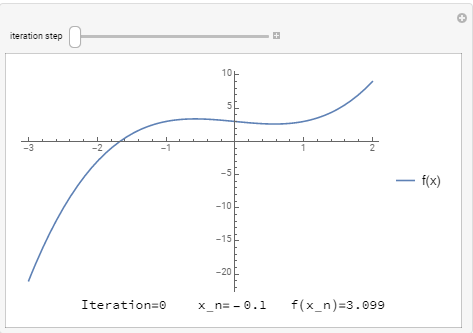
Depending on the shape of the function and the initial guess, the Newton-Raphson method can get stuck in a loop. The tool below visualizes the algorithm when trying to find the root of with an initial guess of  . The algorithm goes into an infinite loop.
. The algorithm goes into an infinite loop.
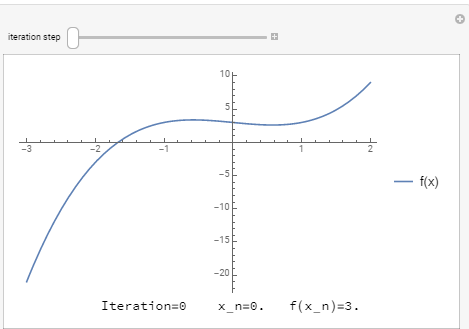
In general, an initial guess that is close enough to the true root will guarantee quick convergence. The tool below visualizes the algorithm when trying to find the root of with an initial guess of  . The algorithm quickly converges to the desired root.
. The algorithm quickly converges to the desired root.
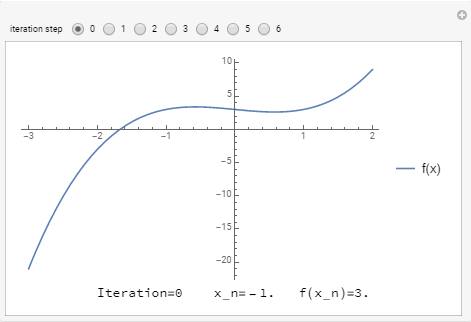
The following is the Mathematica code used to generate one of the tools above:
View Mathematica CodeManipulate[
f[x_] := x^3 - x + 3;
fp = D[f[x], x];
xtable = {-0.1};
er = {1.};
es = 0.0005;
MaxIter = 100;
i = 1;
While[And[i <= MaxIter, Abs[er[[i]]] > es], xnew = xtable[[i]] - (f[xtable[[i]]]/fp /. x -> xtable[[i]]); xtable = Append[xtable, xnew]; ernew = (xnew - xtable[[i]])/xnew; er = Append[er, ernew]; i++];
T = Length[xtable];
SolutionTable = Table[{i - 1, xtable[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
LineTable1 = Table[{{T[[i, 2]], 0}, {T[[i, 2]], f[T[[i, 2]]]}, {T[[i + 1, 2]], 0}}, {i, 2, n - 1}];
Grid[{{Plot[f[x], {x, -3, 2}, PlotLegends -> {"f(x)"}, ImageSize -> Medium, Epilog -> {Dashed, Line[LineTable1]}]}, {Row[{"Iteration=", n - 2, " x_n=", T[[n, 2]], " f(x_n)=", f[T[[n, 2]]]}]}}] , {n, 2, 33, 1}]
import numpy as np
import sympy as sp
import matplotlib.pyplot as plt
from ipywidgets.widgets import interact
def f(x): return x**3 - x + 3
x = sp.symbols('x')
fp = f(x).diff(x)
@interact(n=(2,33,1))
def update(n=2):
xtable = [-0.1]
er = [1]
es = 0.0005
MaxIter = 100
i = 0
while i <= MaxIter and abs(er[i]) > es:
xnew = xtable[i] - (f(xtable[i])/fp.subs(x,xtable[i]))
xtable.append(xnew)
ernew = (xnew - xtable[i])/xnew
er.append(ernew)
i+=1
SolutionTable = [[i - 1, xtable[i], er[i]] for i in range(len(xtable))]
LineTable = [[],[]]
for i in range(n-2):
LineTable[0].extend([SolutionTable[i][1], SolutionTable[i][1], SolutionTable[i + 1][1]])
LineTable[1].extend([0, f(SolutionTable[i][1]), 0])
x_val = np.arange(-3,2.2,0.03)
y_val = x_val**3 - x_val + 3
plt.plot(x_val,y_val, label="f(x)")
plt.plot(LineTable[0],LineTable[1],'k--')
plt.xlim(-3,2.2); plt.ylim(-25,10)
plt.legend(); plt.grid(); plt.show()
print("Iteration =",n-2," x_n =",round(SolutionTable[n-2][1],5)," f(x_n) =",round(f(SolutionTable[n-2][1]),5))
In the Microsoft Excel table, the # of iteration should be 1,2,3,4, not 0,1,2,3.
Either choice is fine
I have the newtenRaphson method in matlab but I have faced a problem or waring message.
please could you help me?