
Piecewise Interpolation: Quadratic Spline Interpolation
Quadratic Spline Interpolation
For quadratic spline interpolation, we present two possible quadratic interpolation schemes.
Scheme 1:
In the first scheme, the intervals between the data points are used as intervals on which a quadratic function is defined. On the intermediate nodes, the slope of the parabola on the left is equated to the slope of the parabola on the right (Figure 3). Consider a set of  data points
data points  , with
, with  intervals. We seek to find a quadratic polynomial
intervals. We seek to find a quadratic polynomial  on the
on the  interval
interval ![[x_i,x_{i+1}]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f80892a0817c3ad069c01268c0236086_l3.png "Rendered by QuickLaTeX.com") . In total, there are
. In total, there are  coefficients. On each interval, the two equations
coefficients. On each interval, the two equations  and
and  ensure that the spline passes through the data points which also ensure the continuity of the splines. These continuity equations will provide
ensure that the spline passes through the data points which also ensure the continuity of the splines. These continuity equations will provide  equations. In addition, the connection of the quadratic polynomials at intermediate nodes will be assumed to be smooth, and so at every intermediate point the first derivative is assumed to be continuous, that is
equations. In addition, the connection of the quadratic polynomials at intermediate nodes will be assumed to be smooth, and so at every intermediate point the first derivative is assumed to be continuous, that is  . These first-derivative continuity equations provide another
. These first-derivative continuity equations provide another  equations. Finally, the second derivative at the starting point can be set to 0 to provide one additional condition so that the number of equations would be equal to which is equal to the number of unknowns. The following are the resulting equations:
equations. Finally, the second derivative at the starting point can be set to 0 to provide one additional condition so that the number of equations would be equal to which is equal to the number of unknowns. The following are the resulting equations:
![\[\begin{split} a_1+b_1x_1+c_1x_1^2&=y_1\\ a_1+b_1x_2+c_1x_2^2&=y_2\\ a_2+b_2x_2+c_2x_2^2&=y_2\\ a_2+b_2x_3+c_2x_3^2&=y_3\\ \vdots&\\ a_{k-1}+b_{k-1}x_{k-1}+c_{k-1}x_{k-1}^2&=y_{k-1}\\ a_{k-1}+b_{k-1}x_k+c_{k-1}x_k^2&=y_k\\ b_1+2c_1x_2-b_2-2c_2x_2&=0\\ b_2+2c_2x_3-b_3-2c_3x_3&=0\\ \vdots&\\ b_{k-2}+2c_{k-2}x_{k-1}-b_{k-1}-2c_{k-1}x_{k-1}&=0\\ 2c_1&=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b6667c4eaa8d70daebbc7a84a574f99d_l3.png "Rendered by QuickLaTeX.com")
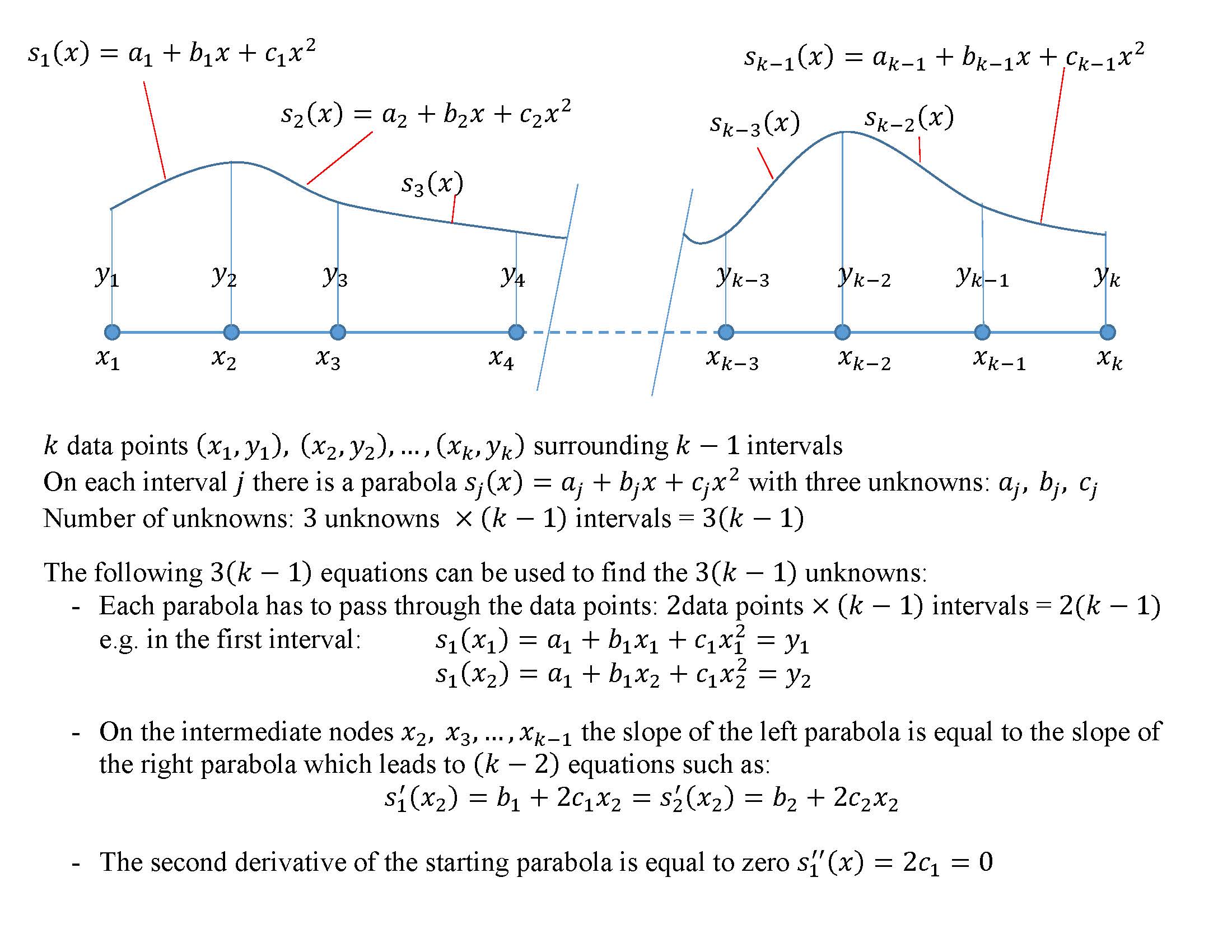
Figure 3. Scheme 1 of piecewise quadratic interpolation with continuity in the interpolating function and its first derivative
The following Mathematica code implements this procedure for a set of data (the procedure will only work if  ).
).
Data = {{-1, 0.038}, {-0.8, 0.058}, {-0.60, 0.10}, {-0.4, 0.20}, {-0.2, 0.50}, {0, 1}, {0.2, 0.5}, {0.4, 0.2}, {0.6, 0.1}, {0.8, 0.058}, {1, 0.038}};
Spline2[Data_] := (k1 = Length[Data] - 1;
y = Table[If[i <= 2 k1,If[EvenQ[i], Data[[i/2 + 1, 2]], Data[[(i + 1)/2, 2]]], 0], {i,1, 3 k1}];
M = Table[0, {i, 1, 3 k1}, {j, 1, 3 k1}];
For[i = 1, i <= k1, i = i + 1,
M[[2 i - 1, 3 (i - 1) + 1]] = M[[2 i, 3 (i - 1) + 1]] = 1;
M[[2 i - 1, 3 (i - 1) + 2]] = Data[[i, 1]];
M[[2 i - 1, 3 (i - 1) + 1 + 2]] = Data[[i, 1]]^2;
M[[2 i, 3 (i - 1) + 1 + 1]] = Data[[i + 1, 1]];
M[[2 i, 3 (i - 1) + 1 + 2]] = Data[[i + 1, 1]]^2];
For[i = 1, i <= k1 - 1, i = i + 1,
M[[2 k1 + i, 3 (i - 1) + 1 + 1]] = 1;
M[[2 k1 + i, 3 (i - 1) + 1 + 4]] = -1;
M[[2 k1 + i, 3 (i - 1) + 1 + 2]] = 2 Data[[i + 1, 1]];
M[[2 k1 + i, 3 (i - 1) + 1 + 5]] = -2 Data[[i + 1, 1]]];
M[[3 k1, 3]] = 2;
Coef = Inverse[M].y;
pf = Table[{Coef[[3 (i - 1) + 1]] + Coef[[3 (i - 1) + 2]]*x + Coef[[3 (i - 1) + 3]]*x^2, Data[[i, 1]] <= x <= Data[[i + 1, 1]]}, {i, 1, k1}];
Piecewise[pf])
y = Spline2[Data]
M // MatrixForm
yactual=1/(1+25x^2);
a = Plot[{y, yactual}, {x, -1, 1},Epilog -> {PointSize[Large], Point[Data]}, AxesLabel -> {"x", "y1"},ImageSize -> Medium, PlotRange -> All,PlotLegends -> {"y2", "yactual"}, PlotLabel ->"Quadratic spline"]
import numpy as np
import matplotlib.pyplot as plt
Data = [[-1, 0.038], [-0.8, 0.058], [-0.60, 0.10], [-0.4, 0.20], [-0.2, 0.50], [0, 1], [0.2, 0.5], [0.4, 0.2], [0.6, 0.1], [0.8, 0.058], [1, 0.038]]
def Spline2(x, Data):
k1 = len(Data) - 1
y = [(Data[i//2][1] if i%2==0 else Data[(i)//2][1]) if i <= 2*k1 else 0 for i in range(1, 3*k1 + 1)]
M = np.zeros([3*k1, 3*k1])
for i in range(k1):
M[2*(i + 1) - 2][3*i] = M[2*(i + 1) - 1][3*i] = 1
M[2*(i + 1) - 2][3*i + 1] = Data[i][0]
M[2*(i + 1) - 2][3*i + 2] = Data[i][0]**2
M[2*(i + 1) - 1][3*i + 1] = Data[i + 1][0]
M[2*(i + 1) - 1][3*i + 2] = Data[i + 1][0]**2
for i in range(k1 - 1):
M[2*k1 + i][3*i + 1] = 1
M[2*k1 + i][3*i + 4] = -1
M[2*k1 + i][3*i + 2] = 2*Data[i + 1][0]
M[2*k1 + i][3*i + 5] = -2*Data[i + 1][0]
M[3*k1 - 1][2] = 2
print("M Matrix\n", M)
Coef = np.matmul(np.linalg.inv(M),y)
display([['{:30}'.format(str(round(Coef[3*i],3)) + ' + ' + str(round(Coef[3*i + 1],3)) + 'x + ' + str(round(Coef[3*i + 2],3)) + 'x**2'),
'{:15}'.format(str(round(Data[i][0],3))+' <=x<= '+str(round(Data[i + 1][0],3)))] for i in range(k1)])
return np.piecewise(x, [(x >= Data[i][0])&(x <= Data[i + 1][0]) for i in range(k1)],
[lambda x, j=i: Coef[3*j] + Coef[3*j + 1]*x + Coef[3*j + 2]*x**2 for i in range(k1)])
x = np.arange(-1,1,0.01)
y = Spline2(x, Data)
yactual = 1/(1 + 25*x**2)
plt.plot(x,yactual, label="yactual")
plt.plot(x, y, label="y2")
plt.scatter([point[0] for point in Data],[point[1] for point in Data], c='k')
plt.title("Quadratic spline")
plt.xlabel("x"); plt.ylabel("y2")
plt.legend(); plt.grid(); plt.show()
The following MATLAB code applies scheme 1 to data extracted from the Runge function:
Example
Use scheme 1 of quadratic interpolation to find the interpolating function given the following 4 data points (-1, 0.038) (-0.8, 0.058), (-0.60, 0.10), (-0.4, 0.20)
Solution
The four data points ( ) with three intervals (
) with three intervals ( ), therefore, there are
), therefore, there are  unknowns. The following are the nine equations according to scheme 1 to be solved to find the unknowns:
unknowns. The following are the nine equations according to scheme 1 to be solved to find the unknowns:
![\[\begin{split} a_1+b_1(-1)+c_1(-1)^2&=0.038\\ a_1+b_1(-0.8)+c_1(-0.8)^2&=0.058\\ a_2+b_2(-0.8)+c_2(-0.8)^2&=0.058\\ a_2+b_2(-0.6)+c_2(-0.6)^2&=0.10\\ a_3+b_3(-0.6)+c_3(-0.6)^2&=0.10\\ a_3+b_3(-0.4)+c_3(-0.4)^2&=0.20\\ b_1+2c_1(-0.8)-b_2-2c_2(-0.8)&=0\\ b_2+2c_2(-0.6)-b_3-2c_3(-0.6)&=0\\ 2c_1&=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-2e1ca7da50bcfc512414c8e3282e7225_l3.png "Rendered by QuickLaTeX.com")
Solving the above equations produces the following interpolation function:
![\[ y=\begin{cases}s_1(x)=0.138+0.1x,&-1\leq x<-0.8\\ s_2(x)=0.49+0.98x+0.55x^2, &-0.8 \leq x<-0.6\\ s_3(x)=0.616 + 1.4 x + 0.9 x^2, & -0.6 \leq x \leq -0.4 \end{cases} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ae182b38e16e93ab9c9d4aab21e4f14f_l3.png "Rendered by QuickLaTeX.com")
Figure 4 shows the resulting interpolation function along with the four data points. The Mathematica code is provided below the figure.
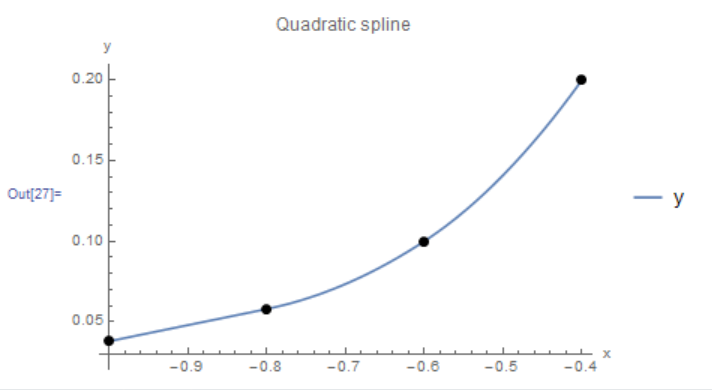
Figure 4. Scheme 1 quadratic interpolation applied to four data points
Data = {{-1, 0.038}, {-0.8, 0.058}, {-0.60, 0.10}, {-0.4, 0.20}};
Spline2[Data_] := (k1 = Length[Data] - 1;
y = Table[
If[i <= 2 k1,
If[EvenQ[i], Data[[i/2 + 1, 2]], Data[[(i + 1)/2, 2]]], 0], {i,
1, 3 k1}];
M = Table[0, {i, 1, 3 k1}, {j, 1, 3 k1}];
For[i = 1, i <= k1, i = i + 1,
M[[2 i - 1, 3 (i - 1) + 1]] = M[[2 i, 3 (i - 1) + 1]] = 1;
M[[2 i - 1, 3 (i - 1) + 2]] = Data[[i, 1]];
M[[2 i - 1, 3 (i - 1) + 1 + 2]] = Data[[i, 1]]^2;
M[[2 i, 3 (i - 1) + 1 + 1]] = Data[[i + 1, 1]];
M[[2 i, 3 (i - 1) + 1 + 2]] = Data[[i + 1, 1]]^2];
For[i = 1, i <= k1 - 1, i = i + 1,
M[[2 k1 + i, 3 (i - 1) + 1 + 1]] = 1;
M[[2 k1 + i, 3 (i - 1) + 1 + 4]] = -1;
M[[2 k1 + i, 3 (i - 1) + 1 + 2]] = 2 Data[[i + 1, 1]];
M[[2 k1 + i, 3 (i - 1) + 1 + 5]] = -2 Data[[i + 1, 1]]];
M[[3 k1, 3]] = 2;
Coef = Inverse[M].y;
pf = Table[{Coef[[3 (i - 1) + 1]] + Coef[[3 (i - 1) + 2]]*x + Coef[[3 (i - 1) + 3]]*x^2, Data[[i, 1]] <= x <= Data[[i + 1, 1]]}, {i, 1, k1}];
Piecewise[pf])
y = Spline2[Data]
M // MatrixForm
a = Plot[{y}, {x, -1, -0.4}, Epilog -> {PointSize[Large], Point[Data]}, AxesLabel -> {"x", "y2"},ImageSize -> Medium, PlotRange -> All, PlotLegends -> {"y2"}, PlotLabel -> "Quadratic spline"]
import numpy as np
import matplotlib.pyplot as plt
Data = [[-1, 0.038], [-0.8, 0.058], [-0.60, 0.10], [-0.4, 0.20]]
def Spline2(x, Data):
k1 = len(Data) - 1
y = [(Data[i//2][1] if i%2==0 else Data[(i)//2][1]) if i <= 2*k1 else 0 for i in range(1, 3*k1 + 1)]
M = np.zeros([3*k1, 3*k1])
for i in range(k1):
M[2*(i + 1) - 2][3*i] = M[2*(i + 1) - 1][3*i] = 1
M[2*(i + 1) - 2][3*i + 1] = Data[i][0]
M[2*(i + 1) - 2][3*i + 2] = Data[i][0]**2
M[2*(i + 1) - 1][3*i + 1] = Data[i + 1][0]
M[2*(i + 1) - 1][3*i + 2] = Data[i + 1][0]**2
for i in range(k1 - 1):
M[2*k1 + i][3*i + 1] = 1
M[2*k1 + i][3*i + 4] = -1
M[2*k1 + i][3*i + 2] = 2*Data[i + 1][0]
M[2*k1 + i][3*i + 5] = -2*Data[i + 1][0]
M[3*k1 - 1][2] = 2
print("M Matrix\n", M)
Coef = np.matmul(np.linalg.inv(M),y)
display([['{:30}'.format(str(round(Coef[3*i],3)) + ' + ' + str(round(Coef[3*i + 1],3)) + 'x + ' + str(round(Coef[3*i + 2],3)) + 'x**2'),
'{:15}'.format(str(round(Data[i][0],3))+' <=x<= '+str(round(Data[i + 1][0],3)))] for i in range(k1)])
return np.piecewise(x, [(x >= Data[i][0])&(x <= Data[i + 1][0]) for i in range(k1)],
[lambda x, j=i: Coef[3*j] + Coef[3*j + 1]*x + Coef[3*j + 2]*x**2 for i in range(k1)])
x = np.arange(-1,-0.4,0.01)
y = Spline2(x, Data)
plt.plot(x, y, label="y2")
plt.scatter([point[0] for point in Data],[point[1] for point in Data], c='k')
plt.title("Quadratic spline")
plt.xlabel("x"); plt.ylabel("y2")
plt.legend(); plt.grid(); plt.show()
The following MATLAB code applies scheme 1 to the data from this example:
Disadvantages
In certain cases, such as fluctuating data, this scheme might lead to some oscillations within the intervals between the data points. As an example, when this scheme is used to fit through the 11 data points of the Runge function given in the previous section, a nice smooth interpolating function is produced for the first few intervals (Figure 5). The condition of having zero second derivative  on the initial interval causes the interpolating in the first interval to follow the line connecting the first two data points. However, in the last five intervals, the interpolating function oscillates and deviates away from the expected behaviour.
on the initial interval causes the interpolating in the first interval to follow the line connecting the first two data points. However, in the last five intervals, the interpolating function oscillates and deviates away from the expected behaviour.
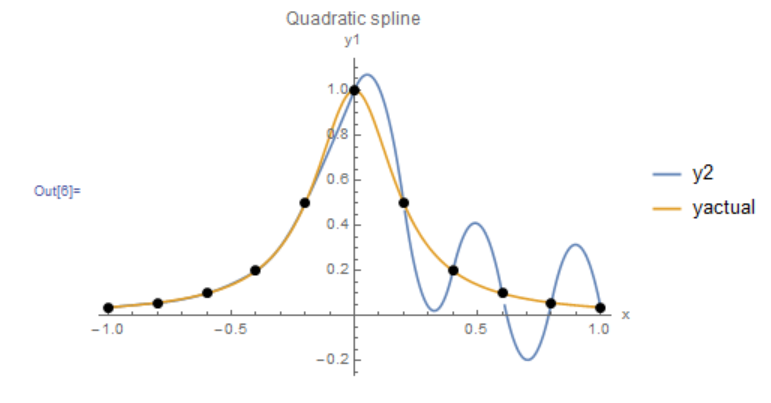
Figure 5. Behaviour of scheme 1 for quadratic interpolation of the Runge function data points.
Scheme 2
For the second scheme, the intervals where the quadratic interpolation functions are defined, are chosen different from the intervals between the data points in a manner to ensure symmetry of the quadratic interpolation. The new intervals where the piecewise quadratic functions are defined are bounded by the points  (Figure 6). Consider a set of data points , with intervals. On each of the intervals bounded by a quadratic polynomial is defined. In total, there are
(Figure 6). Consider a set of data points , with intervals. On each of the intervals bounded by a quadratic polynomial is defined. In total, there are  coefficients. First,the quadratic polynomials have to pass through the data poitns resulting in equations. These quadratic polynomials have to be continuous and differentiable at the
coefficients. First,the quadratic polynomials have to pass through the data poitns resulting in equations. These quadratic polynomials have to be continuous and differentiable at the  intermediate points that are the bounds of the intervals resulting in
intermediate points that are the bounds of the intervals resulting in  equations. Therefore, in total, there are equations which is equal to the number of unknowns. The following are the resulting equations:
equations. Therefore, in total, there are equations which is equal to the number of unknowns. The following are the resulting equations:
![\[\begin{split} a_1+b_1x_1+c_1x_1^2&=y_1\\ a_1+b_1x_2+c_1x_2^2&=y_2\\ a_2+b_2x_3+c_2x_3^2&=y_3\\a_3+b_3x_4+c_3x_4^2&=y_4\\ \vdots&\\ a_{k-2}+b_{k-2}x_{k-1}+c_{k-2}x_{k-1}^2&=y_{k-1}\\ a_{k-2}+b_{k-2}x_k+c_{k-2}x_k^2&=y_k\\ \vdots&\\ a_1+b_1\left(\frac{x_2+x_3}{2}\right)+c_1\left(\frac{x_2+x_3}{2}\right)^2&=a_2+b_2\left(\frac{x_2+x_3}{2}\right)+c_2\left(\frac{x_2+x_3}{2}\right)^2\\ a_2+b_2\left(\frac{x_3+x_4}{2}\right)+c_2\left(\frac{x_3+x_4}{2}\right)^2&=a_3+b_3\left(\frac{x_3+x_4}{2}\right)+c_3\left(\frac{x_3+x_4}{2}\right)^2\\ a_{k-3}+b_{k-3}\left(\frac{x_{k-2}+x_{k-1}}{2}\right)+c_{k-3}\left(\frac{x_{k-2}+x_{k-1}}{2}\right)^2&=\\ a_{k-2}+b_{k-2}\left(\frac{x_{k-2}+x_{k-1}}{2}\right)&+c_{k-2}\left(\frac{x_{k-2}+x_{k-1}}{2}\right)^2\\ b_1+2c_1\left(\frac{x_2+x_3}{2}\right)-b_2-2c_2\left(\frac{x_2+x_3}{2}\right)&=0\\ b_2+2c_2\left(\frac{x_3+x_4}{2}\right)-b_3-2c_3\left(\frac{x_3+x_4}{2}\right)&=0\\ \vdots&\\ b_{k-3}+2c_{k-3}\left(\frac{x_{k-2}+x_{k-1}}{2}\right)-b_{k-2}-2c_{k-2}&\left(\frac{x_{k-2}+x_{k-1}}{2}\right)=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-2ec47687d84870295988a77d9171b595_l3.png "Rendered by QuickLaTeX.com")
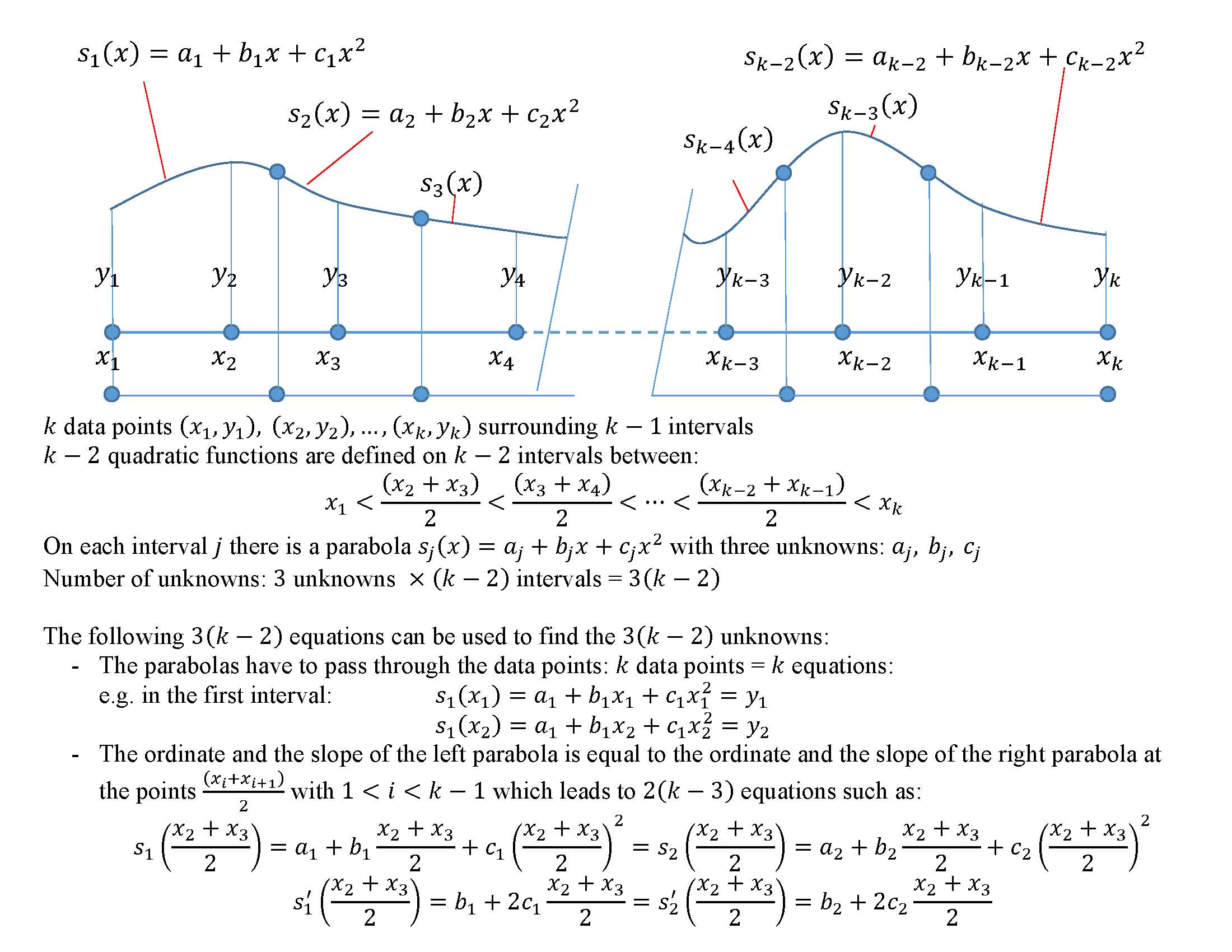
Figure 6. Scheme 2 of piecewise quadratic interpolation with continuity in the interpolating function and its first derivative
The following Mathematica code implements this procedure for a set of data (the procedure will only work if ). As shown in Figure 7, the oscillations produced by scheme 1 disappear if this scheme is used for interpolating the data points of the Runge function given in the previous section.
Data = {{-1, 0.038}, {-0.8, 0.058}, {-0.60, 0.10}, {-0.4,0.20}, {-0.2, 0.50}, {0, 1}, {0.2, 0.5}, {0.4, 0.2}, {0.6,0.1}, {0.8, 0.058}, {1, 0.038}};
Spline2[Data_] := (k = Length[Data];
NewData = Table[0, {i, 1, k - 3}];
Do[NewData[[i]] = (Data[[i + 1]] + Data[[i + 2]])/2, {i, 1, k - 3}];
NNewData = Prepend[Append[NewData, Data[[k]]], Data[[1]]];
y = Table[If[i <= k - 1 + 1, Data[[i, 2]], 0], {i, 1, 3 k - 6}];
M = Table[0, {i, 1, 3 k - 6}, {j, 1, 3 k - 6}];
M[[1, 1]] = M[[2, 1]] = 1;
M[[1, 2]] = Data[[1, 1]];
M[[1, 3]] = Data[[1, 1]]^2;
M[[2, 2]] = Data[[2, 1]];
M[[2, 3]] = Data[[2, 1]]^2;
M[[k - 1, 3 k - 8]] = M[[k, 3 k - 8]] = 1;
M[[k - 1, 3 k - 7]] = Data[[k - 1, 1]];
M[[k - 1, 3 k - 6]] = Data[[k - 1, 1]]^2;
M[[k, 3 k - 7]] = Data[[k, 1]];
M[[k, 3 k - 6]] = Data[[k, 1]]^2;
For[i = 3, i <= k - 2, i = i + 1, M[[i, 3 (i - 2) + 1]] = 1;
M[[i, 3 (i - 2) + 2]] = Data[[i, 1]];
M[[i, 3 (i - 2) + 3]] = Data[[i, 1]]^2];
For[i = 1, i <= k - 3, i = i + 1,
M[[k + i, 3 (i - 1) + 1]] = 1; M[[k + i, 3 (i - 1) + 4]] = -1;
M[[k + i, 3 (i - 1) + 2]] = NewData[[i, 1]];
M[[k + i, 3 (i - 1) + 5]] = -NewData[[i, 1]];
M[[k + i, 3 (i - 1) + 3]] = NewData[[i, 1]]^2;
M[[k + i, 3 (i - 1) + 6]] = -1*NewData[[i, 1]]^2;
M[[k + i + k - 3, 3 (i - 1) + 2]] = 1;
M[[k + i + k - 3, 3 (i - 1) + 5]] = -1;
M[[k + i + k - 3, 3 (i - 1) + 3]] = 2*NewData[[i, 1]];
M[[k + i + k - 3, 3 (i - 1) + 6]] = -2*NewData[[i, 1]]];
Coef = Inverse[M].y;
pf = Table[{Coef[[3 (i - 1) + 1]] + Coef[[3 (i - 1) + 2]]*x + Coef[[3 (i - 1) + 3]]*x^2,NNewData[[i, 1]] <= x <= NNewData[[i + 1, 1]]}, {i, 1, k - 2}];
Piecewise[pf])
y = Spline2[Data]
yactual = 1/(1 + 25 x^2);
M//MatrixForm
a = Plot[{y, yactual}, {x, -1, 1}, Epilog -> {PointSize[Large], Point[Data]}, AxesLabel -> {"x", "y2"},ImageSize -> Medium, PlotRange -> All, PlotLegends -> {"y2", "yactual"}, PlotLabel -> "Quadratic spline"]
import numpy as np
import matplotlib.pyplot as plt
Data = [[-1, 0.038], [-0.8, 0.058], [-0.60, 0.10], [-0.4, 0.20], [-0.2, 0.50], [0, 1], [0.2, 0.5], [0.4, 0.2], [0.6,0.1], [0.8, 0.058], [1, 0.038]]
def Spline2(x, Data):
k = len(Data)
Data = np.array(Data)
NewData = np.array([(Data[i + 1] + Data[i + 2])/2 for i in range(k-3)])
NNewData = np.vstack([Data[0], NewData, Data[k-1]])
y = [Data[i][1] if i < k else 0 for i in range(3*k - 6)]
M = np.zeros([3*k - 6, 3*k - 6])
M[0][0] = M[1][0] = 1
M[0][1] = Data[0][0]
M[0][2] = Data[0][0]**2
M[1][1] = Data[1][0]
M[1][2] = Data[1][0]**2
M[k - 2][3*k - 9] = M[k - 1][3*k - 9] = 1
M[k - 2][3*k - 8] = Data[k - 2][0]
M[k - 2][3*k - 7] = Data[k - 2][0]**2
M[k - 1][3*k - 8] = Data[k - 1][0]
M[k - 1][3*k - 7] = Data[k - 1][0]**2
for i in range(2, k-2):
M[i][3*(i - 1)] = 1
M[i][3*(i - 1) + 1] = Data[i][0]
M[i][3*(i - 1) + 2] = Data[i][0]**2
for i in range(k - 3):
M[k + i][3*i] = 1
M[k + i][3*i + 3] = -1
M[k + i][3*i + 1] = NewData[i][0]
M[k + i][3*i + 4] = -NewData[i][0]
M[k + i][3*i + 2] = NewData[i][0]**2
M[k + i][3*i + 5] = -1*NewData[i][0]**2
M[k + i + k - 3][3*i + 1] = 1
M[k + i + k - 3][3*i + 4] = -1
M[k + i + k - 3][3*i + 2] = 2*NewData[i][0]
M[k + i + k - 3][3*i + 5] = -2*NewData[i][0]
print("M Matrix\n", M)
Coef = np.matmul(np.linalg.inv(M),y)
display([['{:30}'.format(str(round(Coef[3*i],3)) + ' + ' + str(round(Coef[3*i + 1],3)) + 'x + ' + str(round(Coef[3*i + 2],3)) + 'x**2'),
'{:15}'.format(str(round(NNewData[i][0],3))+' <=x<= '+str(round(NNewData[i + 1][0],3)))] for i in range(k - 2)])
return np.piecewise(x, [(x >= NNewData[i][0])&(x <= NNewData[i + 1][0]) for i in range(k - 2)],
[lambda x, j=i: Coef[3*j] + Coef[3*j + 1]*x + Coef[3*j + 2]*x**2 for i in range(k - 2)])
x = np.arange(-1,1,0.01)
yactual = 1/(1 + 25*x**2)
y = Spline2(x, Data)
plt.plot(x, yactual, label="yactual")
plt.plot(x, y, label="y2")
plt.scatter([point[0] for point in Data],[point[1] for point in Data], c='k')
plt.title("Quadratic spline")
plt.xlabel("x"); plt.ylabel("y2")
plt.legend(); plt.grid(); plt.show()
The following MATLAB code applies scheme 2 to data extracted from the Runge function:
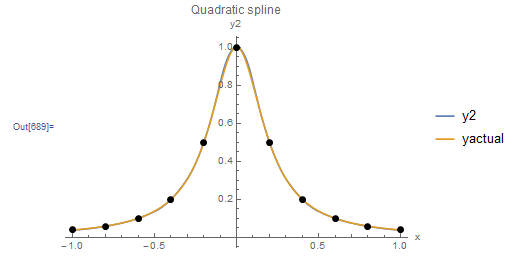
Figure 7. Behaviour of scheme 2 of quadratic interpolation when applied to the Runge function data points
Example
Use scheme 2 of quadratic interpolation to find the interpolating function given the following 5 data points (-1, 0.038) (-0.8, 0.058), (-0.60, 0.10), (-0.4, 0.20), (-0.2, 0.5)
Solution
The five data points ( ) with four intervals (
) with four intervals ( ).
).  intervals for the quadratic interpolation functions are defined between the points
intervals for the quadratic interpolation functions are defined between the points  . Therefore, there are
. Therefore, there are  unknowns. The following are the nine equations according to scheme 2 to be solved to find the unknowns:
unknowns. The following are the nine equations according to scheme 2 to be solved to find the unknowns:
![\[\begin{split} a_1+b_1(-1)+c_1(-1)^2&=0.038\\ a_1+b_1(-0.8)+c_1(-0.8)^2&=0.058\\ a_2+b_2(-0.6)+c_2(-0.6)^2&=0.10\\ a_3+b_3(-0.4)+c_3(-0.4)^2&=0.20\\ a_3+b_3(-0.2)+c_3(-0.2)^2&=0.5\\ a_1+b_1(-0.7)+c_1(-0.7)^2&=a_2+b_2(-0.7)+c_2(-0.7)^2\\ a_2+b_2(-0.5)+c_2(-0.5)^2&=a_3+b_3(-0.5)+c_3(-0.5)^2\\ b_1+2c_1(-0.7)-b_2-2c_2(-0.7)&=0\\ b_2+2c_2(-0.5)-b_3-2c_3(-0.5)&=0\\ \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-8a96c35dcc3c9a32c9bd5147d199970b_l3.png "Rendered by QuickLaTeX.com")
Solving the above equations produces the following interpolation function:
![\[ y=\begin{cases}s_1(x)=0.336857 + 0.547429 x + 0.248571 x^2,&-1\leq x<-0.7\\ s_2(x)=0.440457 + 0.843429 x + 0.46 x^2, &-0.7 \leq x<-0.5\\ s_3(x)=1.02331 + 3.17486 x + 2.79143 x^2, & -0.5\leq x\leq -0.2 \end{cases} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-50dac4b9e37831b404b950be47cbb190_l3.png "Rendered by QuickLaTeX.com")
Figure 8 shows the resulting interpolation function along with the five data points. The Mathematica code is provided below the figure.
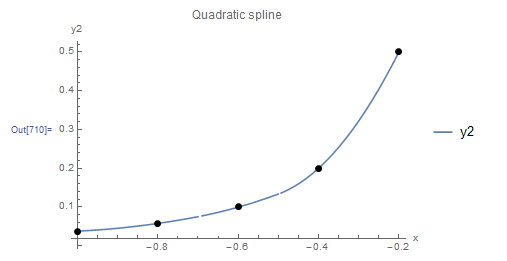
Figure 8. Scheme 2 quadratic interpolation applied to five data points
Data = {{-1, 0.038}, {-0.8, 0.058}, {-0.60, 0.10}, {-0.4,0.20}, {-0.2, 0.50}};
Spline2[Data_] := (k = Length[Data];
NewData = Table[0, {i, 1, k - 3}];
Do[NewData[[i]] = (Data[[i + 1]] + Data[[i + 2]])/2, {i, 1, k - 3}];
NNewData = Prepend[Append[NewData, Data[[k]]], Data[[1]]];
y = Table[If[i <= k - 1 + 1, Data[[i, 2]], 0], {i, 1, 3 k - 6}];
M = Table[0, {i, 1, 3 k - 6}, {j, 1, 3 k - 6}];
M[[1, 1]] = M[[2, 1]] = 1;
M[[1, 2]] = Data[[1, 1]];
M[[1, 3]] = Data[[1, 1]]^2;
M[[2, 2]] = Data[[2, 1]];
M[[2, 3]] = Data[[2, 1]]^2;
M[[k - 1, 3 k - 8]] = M[[k, 3 k - 8]] = 1;
M[[k - 1, 3 k - 7]] = Data[[k - 1, 1]];
M[[k - 1, 3 k - 6]] = Data[[k - 1, 1]]^2;
M[[k, 3 k - 7]] = Data[[k, 1]];
M[[k, 3 k - 6]] = Data[[k, 1]]^2;
For[i = 3, i <= k - 2, i = i + 1, M[[i, 3 (i - 2) + 1]] = 1;
M[[i, 3 (i - 2) + 2]] = Data[[i, 1]];
M[[i, 3 (i - 2) + 3]] = Data[[i, 1]]^2];
For[i = 1, i <= k - 3, i = i + 1, M[[k + i, 3 (i - 1) + 1]] = 1;
M[[k + i, 3 (i - 1) + 4]] = -1;
M[[k + i, 3 (i - 1) + 2]] = NewData[[i, 1]];
M[[k + i, 3 (i - 1) + 5]] = -NewData[[i, 1]];
M[[k + i, 3 (i - 1) + 3]] = NewData[[i, 1]]^2;
M[[k + i, 3 (i - 1) + 6]] = -1*NewData[[i, 1]]^2;
M[[k + i + k - 3, 3 (i - 1) + 2]] = 1;
M[[k + i + k - 3, 3 (i - 1) + 5]] = -1;
M[[k + i + k - 3, 3 (i - 1) + 3]] = 2*NewData[[i, 1]];
M[[k + i + k - 3, 3 (i - 1) + 6]] = -2*NewData[[i, 1]]];
Coef = Inverse[M].y;
pf = Table[{Coef[[3 (i - 1) + 1]] + Coef[[3 (i - 1) + 2]]*x + Coef[[3 (i - 1) + 3]]*x^2, NNewData[[i, 1]] <= x <= NNewData[[i + 1, 1]]}, {i, 1, k - 2}];
Piecewise[pf])
y = Spline2[Data]
M // MatrixForm
a = Plot[{y}, {x, -1, -0.2}, Epilog -> {PointSize[Large], Point[Data]}, AxesLabel -> {"x", "y2"}, ImageSize -> Medium, PlotRange -> All, PlotLegends -> {"y2"}, PlotLabel -> "Quadratic spline"]
import numpy as np
import matplotlib.pyplot as plt
Data = [[-1, 0.038], [-0.8, 0.058], [-0.60, 0.10], [-0.4,0.20], [-0.2, 0.50]]
def Spline2(x, Data):
k = len(Data)
Data = np.array(Data)
NewData = np.array([(Data[i + 1] + Data[i + 2])/2 for i in range(k-3)])
NNewData = np.vstack([Data[0], NewData, Data[k-1]])
y = [Data[i][1] if i < k else 0 for i in range(3*k - 6)]
M = np.zeros([3*k - 6, 3*k - 6])
M[0][0] = M[1][0] = 1
M[0][1] = Data[0][0]
M[0][2] = Data[0][0]**2
M[1][1] = Data[1][0]
M[1][2] = Data[1][0]**2
M[k - 2][3*k - 9] = M[k - 1][3*k - 9] = 1
M[k - 2][3*k - 8] = Data[k - 2][0]
M[k - 2][3*k - 7] = Data[k - 2][0]**2
M[k - 1][3*k - 8] = Data[k - 1][0]
M[k - 1][3*k - 7] = Data[k - 1][0]**2
for i in range(2, k-2):
M[i][3*(i - 1)] = 1
M[i][3*(i - 1) + 1] = Data[i][0]
M[i][3*(i - 1) + 2] = Data[i][0]**2
for i in range(k - 3):
M[k + i][3*i] = 1
M[k + i][3*i + 3] = -1
M[k + i][3*i + 1] = NewData[i][0]
M[k + i][3*i + 4] = -NewData[i][0]
M[k + i][3*i + 2] = NewData[i][0]**2
M[k + i][3*i + 5] = -1*NewData[i][0]**2
M[k + i + k - 3][3*i + 1] = 1
M[k + i + k - 3][3*i + 4] = -1
M[k + i + k - 3][3*i + 2] = 2*NewData[i][0]
M[k + i + k - 3][3*i + 5] = -2*NewData[i][0]
print("M Matrix\n", M)
Coef = np.matmul(np.linalg.inv(M),y)
display([['{:30}'.format(str(round(Coef[3*i],3)) + ' + ' + str(round(Coef[3*i + 1],3)) + 'x + ' + str(round(Coef[3*i + 2],3)) + 'x**2'),
'{:15}'.format(str(round(NNewData[i][0],3))+' <=x<= '+str(round(NNewData[i + 1][0],3)))] for i in range(k - 2)])
return np.piecewise(x, [(x >= NNewData[i][0])&(x <= NNewData[i + 1][0]) for i in range(k - 2)],
[lambda x, j=i: Coef[3*j] + Coef[3*j + 1]*x + Coef[3*j + 2]*x**2 for i in range(k - 2)])
x = np.arange(-1,-0.2,0.01)
y = Spline2(x, Data)
plt.plot(x, y, label="y2")
plt.scatter([point[0] for point in Data],[point[1] for point in Data], c='k')
plt.title("Quadratic spline")
plt.xlabel("x"); plt.ylabel("y2")
plt.legend(); plt.grid(); plt.show()
The following MATLAB code applies scheme 2 to the data from this example: