
Ordinary Differential Equations: Introduction and Examples
Ordinary Differential Equations (ODEs) are equations that relate the derivatives of one or more smooth functions with an independent variable  . The term “ordinary” indicates that there is only one independent variable appearing in the equations.
. The term “ordinary” indicates that there is only one independent variable appearing in the equations.
Examples of Ordinary Differential Equations
ODEs appear naturally in almost all engineering applications. Here are some examples:
Newton’s Second Law of Motion
One of the most ubiquitously used ordinary differential equations is Newton’s second law of motion, which relates the second derivative of the position of a particle (i.e., the acceleration) to the applied force on the particle. The relationship has the form:
![\[ m \frac{\mathrm{d}^2x}{\mathrm{d}t^2}=F(x,t) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-577c9928183b1ea1d56d993d92b84f39_l3.png "Rendered by QuickLaTeX.com")
where  is the mass of the particle. The time
is the mass of the particle. The time  is the independent variable, while the dependent variable is the position
is the independent variable, while the dependent variable is the position  . Newton’s equation adopts different forms depending on the application. For example, to describe the free vibration of a spring-mass system with spring constant
. Newton’s equation adopts different forms depending on the application. For example, to describe the free vibration of a spring-mass system with spring constant  (Figure 1), then the equation has the form:
(Figure 1), then the equation has the form:
![\[ m \frac{\mathrm{d}^2x}{\mathrm{d}t^2}+kx=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f7ab646d1d15221db84c05633762cb79_l3.png "Rendered by QuickLaTeX.com")
where  is the position of the mass at the tip of the spring from the spring’s static equilibrium position.
is the position of the mass at the tip of the spring from the spring’s static equilibrium position.
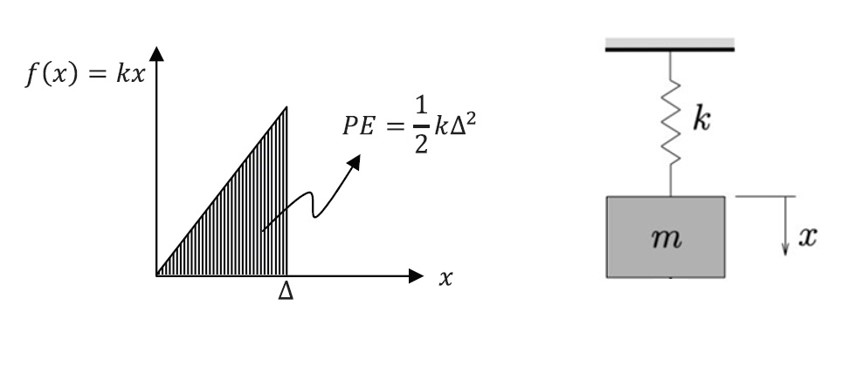
Figure 1. Mass-Linear Elastic Spring System
To clarify, assume a spring-mass system hung vertically. The forces acting on the mass are the spring force and the weight of the mass. The weight of the mass equals equals  where
where  is the gravitational acceleration of the Earth. If
is the gravitational acceleration of the Earth. If  denotes the (arbitrary) position of the mass measured from the unstretched length,
denotes the (arbitrary) position of the mass measured from the unstretched length,  , of the spring (Figure 2), the force by the spring equals
, of the spring (Figure 2), the force by the spring equals  and the Newton’s second law of motion for the hung mass can be written as,
and the Newton’s second law of motion for the hung mass can be written as,
![\[ m\frac{\mathrm d^2y}{\mathrm d^2t}=mg-ky \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-da66cb0d89d0638617dbdb14696cb524_l3.png "Rendered by QuickLaTeX.com")
The negative sign is due to the fact that the weight acts downward and the spring force acts upward when the spring is stretched as shown by the free body diagram in Figure 2.
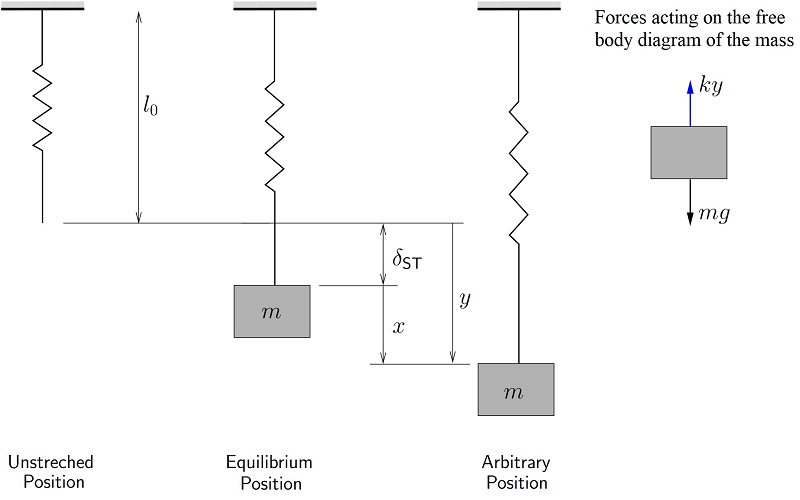
Figure 2. Spring-mass system.
At the static equilibrium (no vibration), the weight of the mass pulls the spring vertically down and initially gives the spring a constant stretch of  . Therefore, can be written as
. Therefore, can be written as  , where is the position of the mass with respect to the static equilibrium of the mass. Therefore, the above equation can be written as,
, where is the position of the mass with respect to the static equilibrium of the mass. Therefore, the above equation can be written as,
![\[\begin{split} m\frac{\mathrm d^2(x+\delta_{ST})}{\mathrm d^2t}&=mg-k(x+\delta_{ST})\\ m\frac{\mathrm d^2(x)}{\mathrm d^2t}&=-kx+mg-mg\\ \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-07c9ba7cf78c2cea4001913db2410601_l3.png "Rendered by QuickLaTeX.com")
which leads to,
![\[ m\frac{\mathrm d^2(x)}{\mathrm d^2t}+kx=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b1667c16e9263779ae8d4083e4c48817_l3.png "Rendered by QuickLaTeX.com")
The explicit solution to this equation has the following form:
![\[ x(t)=\frac{v_0}{\sqrt{k/m}}\sin\left(\sqrt{\frac{k}{m}t}\right)+x_0\cos\left(\sqrt{\frac{k}{m}t}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f2b546cd29447cfce31903f040a23c4d_l3.png "Rendered by QuickLaTeX.com")
where  and
and  the initial position and initial velocity of the mass, and
the initial position and initial velocity of the mass, and  is the natural frequency of the system (denoted as
is the natural frequency of the system (denoted as  or
or  ).
).
The displacement response of the system has the form shown in Figure 3.
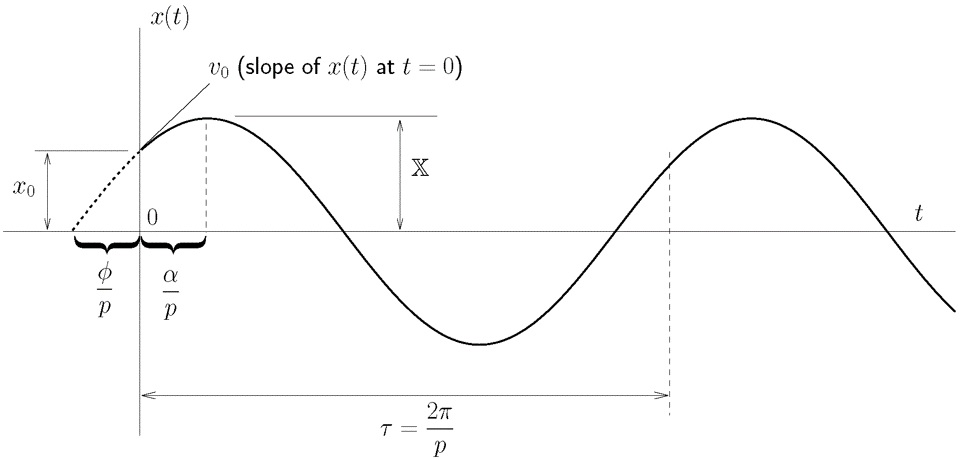
Figure 3. Free Vibration Response of a simple Mass-Spring System
If the external forces include a damping force (a force that is a function of the velocity and that is always opposite to the direction of motion), then, the equation has the form:
![\[ m \frac{\mathrm{d}^2x}{\mathrm{d}t^2}+c\frac{\mathrm{d}x}{\mathrm{d}t}+kx=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-7b11005ffa9f1f92bc327bd665dade70_l3.png "Rendered by QuickLaTeX.com")
where  is the damping coefficient.
is the damping coefficient.
The explicit solution to this equation has the following form:
![\[ x(t)=e^{-\zeta pt}\left[\frac{v_0+\zeta px_0}{\sqrt{1-\zeta^2p}}\sin\left(\sqrt{1-\zeta^2}pt\right)+x_0\cos\left(\sqrt{1-\zeta^2}pt\right)\right] \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1f3c31dee953c8ef1ff02a49a42a2bff_l3.png "Rendered by QuickLaTeX.com")
where  is the damping ratio and
is the damping ratio and  is the natural frequency of the system. Again and are the initial displacement and initial velocity of the mass, respectively.
is the natural frequency of the system. Again and are the initial displacement and initial velocity of the mass, respectively.
The displacement response for the free vibration of a damped spring-mass system is shown in Figure 4.
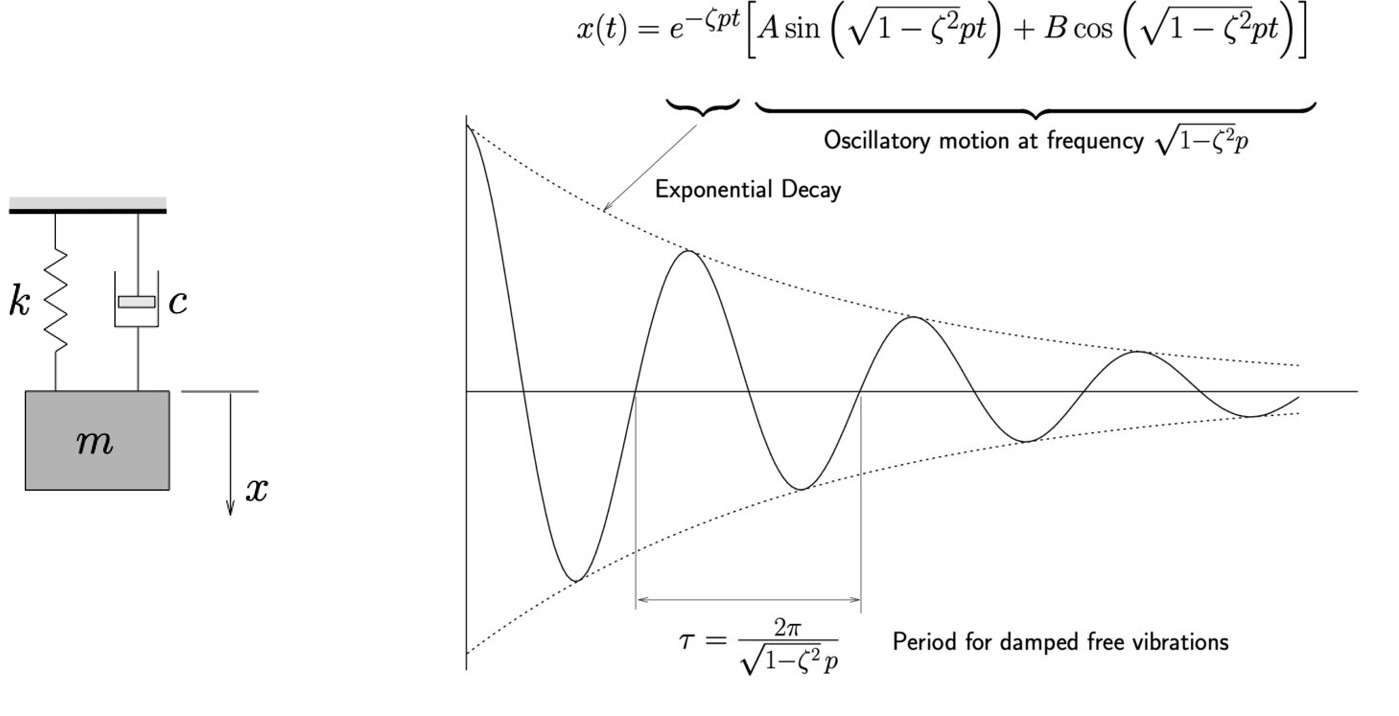
Figure 4. Left: Simple damped spring-mass system. Right: Free vibration response of a damped mass-spring system.
The following code utilizes the built-in DSolve function in Mathematica to solve the above simple equations. Also, the Manipulate built-in function is used to visualize the effect of varying and  on the resulting vibration of the system.
on the resulting vibration of the system.
Clear[x, g, k, m]
(*General Solution*)
a = DSolve[m*x''[t] == - k*x[t] - beta*x'[t], x, t];
Print["General Solution (damped system)="]
x = x[t] /. a[[1]]
(*Solution*)
Clear[x, g, k, m, beta]
a = DSolve[{m*x''[t] == - k*x[t] - beta*x'[t], x[0] == 0, x'[0] == 0}, x, t];
Print["Solution with initial velocity and displacement =0"]
x = x[t] /. a[[1]];
x = Simplify[x]
Manipulate[g = 1;Graphics3D[{Cuboid[{-1, -1, -5}, {0, 0, -((E^(-(((beta + Sqrt[beta^2 - 4 k m]) t)/(2 m)))m (beta (-1 + E^((Sqrt[beta^2 - 4 k m] t)/m)) + (1 + E^((Sqrt[beta^2 - 4 k m] t)/m)-2 E^(((beta + Sqrt[beta^2 - 4 k m]) t)/(2 m))) Sqrt[beta^2 - 4 k m]))/(2 k Sqrt[beta^2 - 4 k m]))}]}, Axes -> True, PlotRange -> {{-1, 0}, {-1, 0}, {-5, 10}}, AxesOrigin -> {0, 0, 0}, ViewVertical -> {0, 0, -1}], {t, 0, 2*4*Pi*Sqrt[5]}, {m, 1, 5}, {beta, 0, 5}, {k, 1, 5}]
# UPGRADE: need Sympy 1.2 or later, upgrade by running: "!pip install sympy --upgrade" in a code cell
# !pip install sympy --upgrade
import cmath
import numpy as np
import sympy as sp
import matplotlib.pyplot as plt
from IPython.display import HTML
from ipywidgets.widgets import interact, Play
sp.init_printing(use_latex=True)
display(HTML('<link rel="stylesheet" href="//stackpath.bootstrapcdn.com/font-awesome/4.7.0/css/font-awesome.min.css"/>'))
x = sp.Function('x')
m, k, t, beta = sp.symbols('m k t beta')
# General Solution
sol = sp.dsolve(m*x(t).diff(t,2) + k*x(t) + beta*x(t).diff(t))
display("General Solution (damped system):", sol)
# Solution
sol = sp.dsolve(m*x(t).diff(t,2) + k*x(t) + beta*x(t).diff(t), ics={x(0): 0, x(t).diff(t).subs(t, 0): 0})
display("Solution with initial velocity and displacement = 0:", sp.simplify(sol))
@interact(t=Play(value=0, min=0, max=60, step=1, interval=500),
m=(1,5,0.01), k=(1,5,0.01), beta=(0,5,0.01))
def update(t, m=1, k=1, beta=0):
g = 1
s = cmath.sqrt(beta**2 - 4*k*m)
x = -((np.exp(-(((beta + s)*t)/(2*m)))*m*(beta*(-1 + np.exp((s*t)/m)) + (1 + np.exp((s*t)/m)-2*np.exp(((beta + s)*t)/(2*m)))*s))/(2*k*s))
plt.xlim(0,10); plt.ylim(-0.1,0.1)
plt.yticks([])
plt.title('x = '+str(np.round(x,3)))
plt.plot([0,x],[0,0],lw=50)
View Python Code
# Spring Animation
# UPGRADE: need Sympy 1.2 or later, upgrade by running: "!pip install sympy --upgrade" in a code cell
# !pip install sympy --upgrade
import numpy as np
import sympy as sp
import matplotlib.pyplot as plt
from IPython.display import HTML
from scipy.integrate import odeint
from matplotlib.patches import Rectangle
from ipywidgets.widgets import interact
display(HTML('<link rel="stylesheet" href="//stackpath.bootstrapcdn.com/font-awesome/4.7.0/css/font-awesome.min.css"/>'))
r = sp.Function('r')
t = sp.symbols('t')
x_val = np.arange(0,5,0.01)
@interact(displacement=(-0.1,0.1,0.05), velocity=(-1,1,0.05),
mass=(5,10,0.05), damping_ratio=(0,1,0.01), stiffness=(200,750,1))
def update(displacement=0, velocity=0, mass=5, damping_ratio=0, stiffness=200):
run = 1
cd = 1.5*(2*np.sqrt(stiffness*mass));
w = np.sqrt(stiffness/(mass))
w1 = w/(2*np.pi)
Tn = 1/w1
U = (displacement + velocity)*Tn
nt = run/Tn
da = damping_ratio*cd
sol = sp.dsolve(mass*r(t).diff(t,2) + da*r(t).diff(t) + stiffness*r(t), ics={r(0): displacement, r(t).diff(t).subs(t,0): velocity})
l = sol.rhs.subs(t,run)
plt.xlim(-1, 20)
plt.ylim(-6, 6)
plt.plot([-0.5,0,0],[0,0,2], 'k')
plt.plot([3 + l, 3 + l, 4.5 + l],[-2, 0, 0], 'k')
plt.plot([3*nx/11 + l*nx/11 for nx in range(12)],
[2*np.cos(np.pi*nx) for nx in range(12)], 'k')
ax = plt.gca()
ax.add_patch(Rectangle((-1,-6),0.5,12,color='black'))
ax.add_patch(Rectangle((4.5 + l, -2),4,4,color='rosybrown'))
plt.text(4,3,"f_n(Hz) = {}".format(round(w1,5)))
plt.text(4,4,"T_n(s) = {}".format(round(Tn,5)))
plt.show()
plt.plot(x_val, [sol.rhs.subs(t,i) for i in x_val])
plt.grid(); plt.show()
Beam Deflection
The deflection of an Euler-Bernoulli beam follows the following equation:
![\[ EI\frac{\mathrm{d}^4y}{\mathrm{d}x^4}=q \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-391a8d6335737c04a05448c78673809d_l3.png "Rendered by QuickLaTeX.com")
where  is the beam’s Young’s modulus,
is the beam’s Young’s modulus,  is the cross sectional moment of inertia, is the beam’s deflection (the dependent variable),
is the cross sectional moment of inertia, is the beam’s deflection (the dependent variable),  is the applied distributed load on the beam, and is the position along the beam’s length (the independent variable). For a fixed-ends beam; if the deflection and rotation at both ends of a beam of length
is the applied distributed load on the beam, and is the position along the beam’s length (the independent variable). For a fixed-ends beam; if the deflection and rotation at both ends of a beam of length  is equal to zero, i.e.
is equal to zero, i.e.  , and if is constant, then, the deflection of the beam has the form:
, and if is constant, then, the deflection of the beam has the form:
![\[ y=\frac{qx^4-2Lqx^3+qL^2x^2}{24EI} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b3dc220681584d1aa66a49439aa0129e_l3.png "Rendered by QuickLaTeX.com")
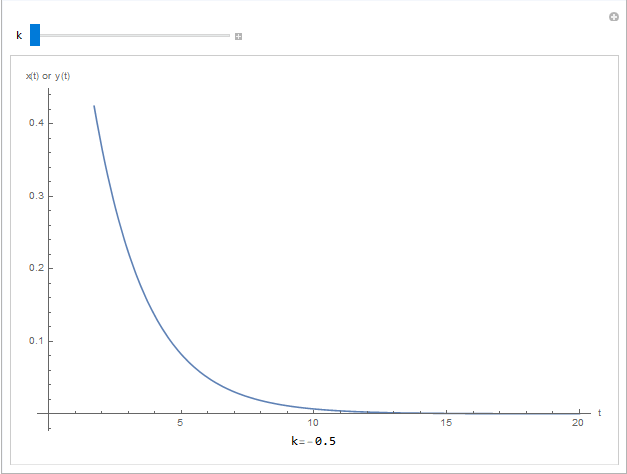
Growth and Decay
If is the number of organisms at any time , and if the growth of the number depends on the number that is already there, then, the ODE that would describe this uninhibited growth is given by:
![\[ \frac{\mathrm{d}x}{\mathrm{d}t}=kx \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-01f93720248e56782a98a69a0cc9e7d8_l3.png "Rendered by QuickLaTeX.com")
Where is a positive constant. The time is the independent variable, while the dependent variable is the number of organisms . The general solution of this equation has the form:
![\[ x=C_1e^{kt} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-054d22e687b56fbfe0075def79d857f7_l3.png "Rendered by QuickLaTeX.com")
where  is a constant depending on the boundary conditions. If the initial condition is such that
is a constant depending on the boundary conditions. If the initial condition is such that  then, the solution has the form:
then, the solution has the form:
![\[ x=Ae^{kt} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-564bd7f21ae2e76711fd973c4b703680_l3.png "Rendered by QuickLaTeX.com")
Similarly, if rate of decrease (decay) of a quantity is a function of the amount available, then, the uninhibited decay can be described by the equation:
![\[ \frac{\mathrm{d}y}{\mathrm{d}t}=-hy \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6722f702950ceb5411ff48954610bfdb_l3.png "Rendered by QuickLaTeX.com")
where  is a positive constant. The time is the independent variable, while the dependent variable is the quantity
is a positive constant. The time is the independent variable, while the dependent variable is the quantity  . Radioactive decay follows this ODE. The general solution of this equation has the form:
. Radioactive decay follows this ODE. The general solution of this equation has the form:
![\[ y=C_1e^{-ht} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1e52ca7c360376c35e2afb469481a118_l3.png "Rendered by QuickLaTeX.com")
where is a constant depending on the boundary conditions. If the initial condition is such that  then, the solution has the form:
then, the solution has the form:
![\[ y=Ae^{-ht} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-36db29bda10a8c4fc5b63a7a2cf72ea8_l3.png "Rendered by QuickLaTeX.com")
The following tool plots the quantities or when  for different values of the exponent:
for different values of the exponent:
Clear[x]
a = DSolve[x'[t] == k*x[t], x, t];
x = x[t] /. a[[1]]
Clear[x]
a = DSolve[{x'[t] == k*x[t], x[0] == A}, x, t]
x = x[t] /. a[[1]]
Manipulate[A = 1; r = Grid[{{"k=", k}}, Spacings -> 0]; Grid[{{Plot[A*E^(k*t), {t, 0, 20}, AxesLabel -> {"t", "x(t) or y(t)"}, ImageSize -> Medium]}, {r}}], {k, -0.5, 0.5}]
# UPGRADE: need Sympy 1.2 or later, upgrade by running: "!pip install sympy --upgrade" in a code cell
# !pip install sympy --upgrade
import numpy as np
import sympy as sp
import matplotlib.pyplot as plt
from ipywidgets.widgets import interact
sp.init_printing(use_latex=True)
x = sp.Function('x')
t, k, A = sp.symbols('t k A')
sol = sp.dsolve(x(t).diff(t) - k*x(t))
display(sol)
sol = sp.dsolve(x(t).diff(t) - k*x(t), ics={x(0): A})
display(sol)
@interact(k=(-0.5,0.5,0.01))
def update(k=-0.5):
x = np.arange(0,20,0.1)
y = np.exp(k*x)
plt.plot(x,y)
plt.xlabel('t'); plt.ylabel('x(t) or y(t)')
plt.grid(); plt.show()
Electrical Capacitors and Inductors
Simple electric circuits are composed of three components: resistances, capacitors, and inductors. The relationship between the voltage drop  across a resistance, and the current
across a resistance, and the current  passing through it is given by:
passing through it is given by:
![\[ V_R=R I_R \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f3cfc7e49d057bda5786f74a483f670d_l3.png "Rendered by QuickLaTeX.com")
where  is the constant of proportionality, namely the value of the electric resistance. A capacitor on the other hand is an element that has the following relationship between the current passing through it
is the constant of proportionality, namely the value of the electric resistance. A capacitor on the other hand is an element that has the following relationship between the current passing through it  and the rate of change of the voltage drop across it
and the rate of change of the voltage drop across it  :
:
![\[ I_C=C \frac{\mathrm{d}V_C}{\mathrm{d}t} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d75b64b11e767eacc53d684c0197618b_l3.png "Rendered by QuickLaTeX.com")
where  is the constant of proportionality, namely the capacitance. An inductor is an element that has the following relationship between the voltage drop across it
is the constant of proportionality, namely the capacitance. An inductor is an element that has the following relationship between the voltage drop across it  and the rate of change of the current that passes through it
and the rate of change of the current that passes through it  :
:
![\[ V_I=L \frac{\mathrm{d}I_I}{\mathrm{d}t} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-719387dbc83bff09021a3593f24c1043_l3.png "Rendered by QuickLaTeX.com")
Where is the constant of proportionality, namely the inductance. When the elements are combined, ODEs are generated with being the independent variable, and  and being the dependent variables.
and being the dependent variables.