
Curve Fitting: Extension of Linear Regression
Extension of Linear Regression
In the previous section, the model function  was linear in
was linear in  . However, we can have a model function that is linear in the unknown coefficients but non-linear in . In a general sense, the model function can be composed of
. However, we can have a model function that is linear in the unknown coefficients but non-linear in . In a general sense, the model function can be composed of  terms with the following form:
terms with the following form:
![\[y(x)=a_1f_1(x)+a_2f_2(x)+a_3f_3(x)+\cdots+a_mf_m(x)=\sum_{j=1}^ma_jf_j(x)\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d44dfe02e50b4bed276bee96ce959d90_l3.png "Rendered by QuickLaTeX.com")
Note that the linear regression model can be viewed as a special case of this general form with only two functions  and
and  . Another special case of this general form is polynomial regression where the model function has the form:
. Another special case of this general form is polynomial regression where the model function has the form:
![\[y(x)=a_0+a_1x+a_2x^2+a_3x^3+\cdots+a_mx^m\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ae79e93fcb93a29549cde2bad5af6199_l3.png "Rendered by QuickLaTeX.com")
The regression procedure constitutes finding the coefficients  that would yield the least sum of squared differences between the data and model prediction. Given a set of data
that would yield the least sum of squared differences between the data and model prediction. Given a set of data  with
with  , and if
, and if  is the sum of the squared differences between a general linear regression model and the data, then has the form:
is the sum of the squared differences between a general linear regression model and the data, then has the form:
![\[S=\sum_{i=1}^n\left(y(x_i)-y_i\right)^2=\sum_{i=1}^n\left(\sum_{j=1}^ma_jf_j(x_i)-y_i\right)^2\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b83cd79ef044a2bc60c9e75bfe6b68c4_l3.png "Rendered by QuickLaTeX.com")
To find the minimizers of , the derivatives of with respect to each of the coefficients can be equated to zero. Taking the derivative of with respect to an arbitrary coefficient  and equating to zero yields the general equation:
and equating to zero yields the general equation:
![\[\frac{\partial S}{\partial a_k}=\sum_{i=1}^n\left(2\left(\sum_{j=1}^ma_jf_j(x_i)-y_i\right)f_k(x_i)\right)=0\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-4cc80e10552d677aca80a49670548095_l3.png "Rendered by QuickLaTeX.com")
A system of
-equations of the unknowns  can be formed and have the form:
can be formed and have the form:
![\[\begin{split}\left(\begin{matrix}\sum_{i=1}^nf_1(x_i)f_1(x_i)&\sum_{i=1}^nf_1(x_i)f_2(x_i)&\cdots & \sum_{i=1}^nf_1(x_i)f_m(x_i)\\\sum_{i=1}^nf_2(x_i)f_1(x_i)&\sum_{i=1}^nf_2(x_i)f_2(x_i)&\cdots & \sum_{i=1}^nf_2(x_i)f_m(x_i)\\\vdots&\vdots&\ddots & \vdots\\\sum_{i=1}^nf_m(x_i)f_1(x_i)&\sum_{i=1}^nf_m(x_i)f_2(x_i)&\cdots & \sum_{i=1}^nf_m(x_i)f_m(x_i)\end{matrix}\right)&\left(\begin{array}{c}a_1\\a_2\\\vdots\\a_m\end{array}\right)\\&=\left(\begin{array}{c}\sum_{i=1}^ny_if_1(x_i)\\\sum_{i=1}^ny_if_2(x_i)\\\vdots\\\sum_{i=1}^ny_if_m(x_i)\end{array}\right)\end{split}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-8b616f5a3f6d3b97327c08c8a2066777_l3.png "Rendered by QuickLaTeX.com")
It can be shown that the above system always has a unique solution when the functions  are non-zero and distinct. Solving these equations yields the best fit to the data, i.e., the best coefficients
are non-zero and distinct. Solving these equations yields the best fit to the data, i.e., the best coefficients  that would minimize the sum of the squares of the differences between the model and the data. The coefficient of determination can be obtained as described above.
that would minimize the sum of the squares of the differences between the model and the data. The coefficient of determination can be obtained as described above.
Example 1
Consider the data (1,0.5), (2,2.5), (3,2), (4,4), (5,3.5), (6,6), (7,5.5). Consider a model of the form
![\[y=a_1+a_2x+a_3 \cos{(\pi x)} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5d523a469d2fff4ed368ea2a98d57542_l3.png "Rendered by QuickLaTeX.com")
Find the coefficients
 ,
,  , and
, and  that would give the best fit.
that would give the best fit.
Solution
This model is composed of a linear combination of three functions: , , and  . To find the best coefficients, the following linear system of equations needs to be solved:
. To find the best coefficients, the following linear system of equations needs to be solved:
![\[\begin{split}\left(\begin{matrix}\sum_{i=1}^nf_1(x_i)f_1(x_i)&\sum_{i=1}^nf_1(x_i)f_2(x_i)& \sum_{i=1}^nf_1(x_i)f_3(x_i)\\\sum_{i=1}^nf_2(x_i)f_1(x_i)&\sum_{i=1}^nf_2(x_i)f_2(x_i)&\sum_{i=1}^nf_2(x_i)f_3(x_i)\\\sum_{i=1}^nf_3(x_i)f_1(x_i)&\sum_{i=1}^nf_3(x_i)f_2(x_i)&\sum_{i=1}^nf_3(x_i)f_3(x_i)\end{matrix}\right)&\left(\begin{array}{c}a_1\\a_2\\a_3\end{array}\right)\\&=\left(\begin{array}{c}\sum_{i=1}^ny_if_1(x_i)\\\sum_{i=1}^ny_if_2(x_i)\\\sum_{i=1}^ny_if_3(x_i)\end{array}\right)\end{split}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-02fd0662ae1c0330b4630b7d09a1a19b_l3.png "Rendered by QuickLaTeX.com")
The following Microsoft Excel table is used to calculate the entries in the above matrix equation
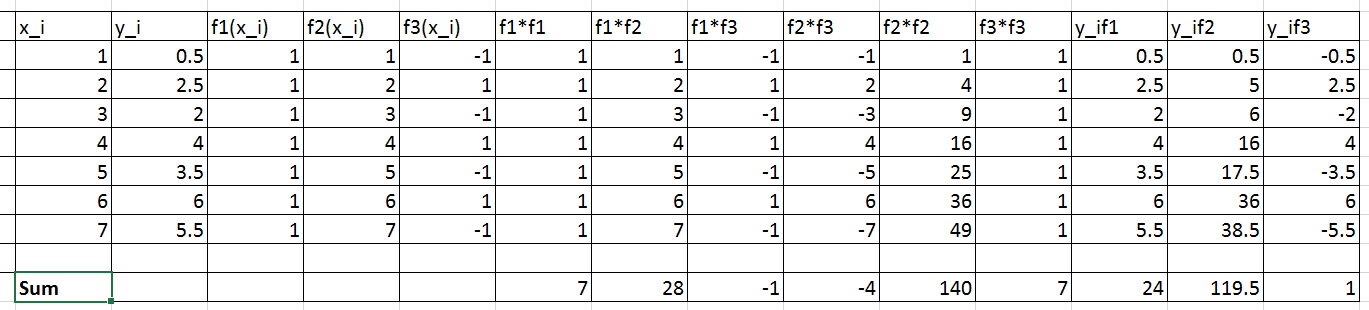
Therefore, the linear system of equations can be written as:
![\[\left(\begin{matrix}7&28&-1\\28&140&-4\\-1&-4&7\end{matrix}\right) \left(\begin{array}{c}a_1\\a_2\\a_3\end{array}\right)=\left(\begin{array}{c}24\\119.5\\1\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5696928b160bcf2668a3af334de2ee0d_l3.png "Rendered by QuickLaTeX.com")
Solving the above system yields  ,
,  ,
,  . Therefore, the best-fit model has the form:
. Therefore, the best-fit model has the form:
![\[y(x)=0.16369+0.83929x+0.64583\cos{(\pi x)}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-258d5227c46e3b1045c628c4ce04e300_l3.png "Rendered by QuickLaTeX.com")
To find the coefficient of determination, the following Microsoft Excel table for the values of  and
and  is used:
is used:
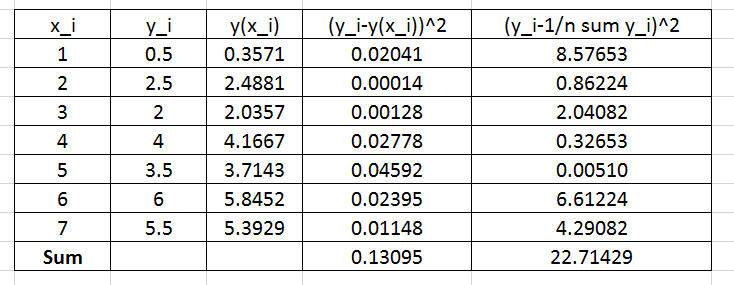
Therefore:
![\[R^2=1-\frac{0.13095}{22.71429}=0.994234 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-aa99b87922c91b043a7af774cd401865_l3.png "Rendered by QuickLaTeX.com")
 is very close to 1 indicating a very good fit!
is very close to 1 indicating a very good fit!
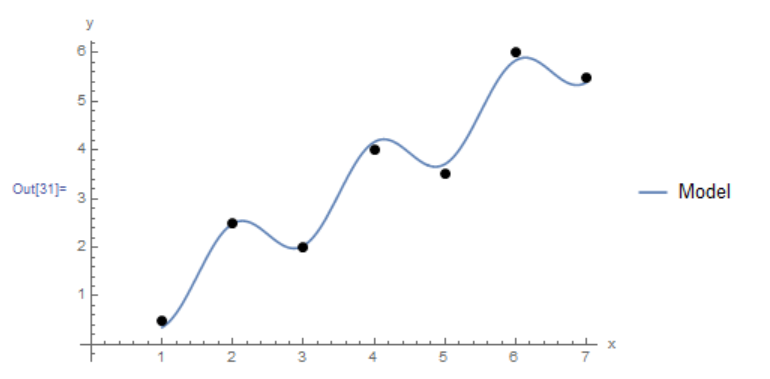
The Mathematica function LinearModelFit[Data,{functions},x] does the above computations and provides the required model. The equation of the model can be retrieved using the built-in function Normal and the can also be retrieved as shown in the code below. The final plot of the model vs. the data is shown below as well.
Clear[a, b, x]
Data = {{1, 0.5}, {2, 2.5}, {3, 2}, {4, 4.0}, {5, 3.5}, {6, 6.0}, {7, 5.5}};
model = LinearModelFit[Data, {1, x, Cos[Pi*x]}, x]
y = Normal[model]
R2 = model["RSquared"]
Plot[y, {x, 1, 7}, Epilog -> {PointSize[Large], Point[Data]}, PlotLegends->{"Model"},AxesLabel -> {"x", "y"}, AxesOrigin -> {0, 0} ]
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import curve_fit
Data = [[1, 0.5], [2, 2.5], [3, 2], [4, 4.0], [5, 3.5], [6, 6.0], [7, 5.5]]
def f(x, a, b, c): return a + b*x + c*np.cos(np.pi*x)
coeff, covariance = curve_fit(f, [point[0] for point in Data],
[point[1] for point in Data])
print("coeff: ",coeff)
x_val = np.arange(0,7,0.01)
plt.title("%.5f + %.5fx + %.5fcos(pi*x)" % tuple(coeff))
plt.plot(x_val, f(x_val, coeff[0], coeff[1], coeff[2]))
plt.scatter([point[0] for point in Data], [point[1] for point in Data], c='k')
plt.xlabel("x"); plt.ylabel("y")
plt.grid(); plt.show()
# R squared
x = np.array([point[0] for point in Data])
y = np.array([point[1] for point in Data])
y_fit = f(x, coeff[0], coeff[1], coeff[2])
ss_res = np.sum((y - y_fit)**2)
ss_tot = np.sum((y - np.mean(y))**2)
r2 = 1 - (ss_res / ss_tot)
print("R Squared: ",r2)
The following links provide the MATLAB codes for implementing the generalized least squares. The function for the model in this example in provided in File 2.
Example 2
Fit a cubic polynomial to the data (1,1.93),(1.1,1.61),(1.2,2.27),(1.3,3.19),(1.4,3.19),(1.5,3.71),(1.6,4.29),(1.7,4.95),(1.8,6.07),(1.9,7.48),(2,8.72),(2.1,9.34),(2.2,11.62).
Solution
A cubic polynomial fit would have the form:
![\[y(x)=a_0+a_1x+a_2x^2+a_3x^3\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-63bc83ab92e27917ade8be60de6606df_l3.png "Rendered by QuickLaTeX.com")
This is a linear combination of the functions  ,
,  ,
,  , and
, and  . The following system of equations needs to be formed to solve for the coefficients
. The following system of equations needs to be formed to solve for the coefficients  , , , and :
, , , and :
![\[\begin{split}\left(\begin{matrix}\sum_{i=1}^nf_0(x_i)f_0(x_i)&\sum_{i=1}^nf_0(x_i)f_1(x_i)&\sum_{i=1}^nf_0(x_i)f_2(x_i) & \sum_{i=1}^nf_0(x_i)f_3(x_i)\\\sum_{i=1}^nf_1(x_i)f_0(x_i)&\sum_{i=1}^nf_1(x_i)f_1(x_i)&\sum_{i=1}^nf_1(x_i)f_2(x_i) & \sum_{i=1}^nf_1(x_i)f_3(x_i)\\\sum_{i=1}^nf_2(x_i)f_0(x_i)&\sum_{i=1}^nf_2(x_i)f_1(x_i)&\sum_{i=1}^nf_2(x_i)f_2(x_i) & \sum_{i=1}^nf_2(x_i)f_3(x_i)\\\sum_{i=1}^nf_3(x_i)f_0(x_i)&\sum_{i=1}^nf_3(x_i)f_1(x_i)&\sum_{i=1}^nf_3(x_i)f_2(x_i) & \sum_{i=1}^nf_3(x_i)f_3(x_i)\\\end{matrix}\right)&\left(\begin{array}{c}a_0\\a_1\\a_2\\a_3\end{array}\right)\\&=\left(\begin{array}{c}\sum_{i=1}^ny_if_0(x_i)\\\sum_{i=1}^ny_if_1(x_i)\\\sum_{i=1}^ny_if_2(x_i)\\\sum_{i=1}^ny_if_3(x_i)\end{array}\right)\end{split}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-33ecb52b060fdccd5e62e4d14823a0a9_l3.png "Rendered by QuickLaTeX.com")
The following Microsoft Excel tables are used to find the entries of the above linear system of equations:
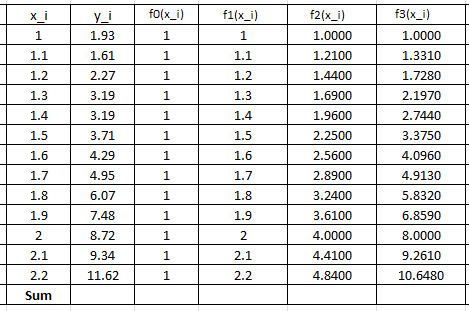
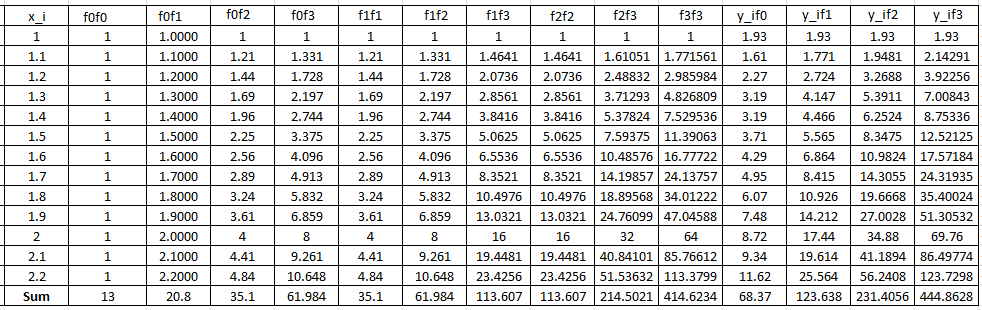
Therefore, the linear system of equations can be written as:
![\[ \left(\begin{matrix}13&20.8&35.1&61.984\\20.8&35.1&61.984&113.607\\35.1&61.984&113.607&214.502\\61.984&113.607&214.502&414.623\end{matrix}\right)\left(\begin{array}{c}a_0\\a_1\\a_2\\a_3\end{array}\right)=\left(\begin{array}{c}68.37\\123.638\\231.4056\\444.8628\end{array}\right)\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-dd0d2562bc466f0da041765d8f559a99_l3.png "Rendered by QuickLaTeX.com")
Solving the above system yields  ,
,  ,
,  , and
, and  . Therefore, the best-fit model has the form:
. Therefore, the best-fit model has the form:
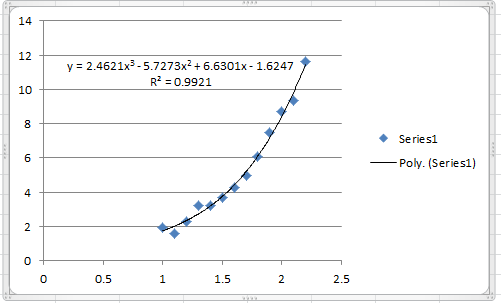
![\[y=-1.6247+6.6301x-5.7273x^2+2.46212x^3\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9b51fa83e89686a1094a3db3d8384576_l3.png "Rendered by QuickLaTeX.com")
The following graph shows the Microsoft Excel plot with the generated cubic trendline. The trendline equation generated by Excel is the same as the one above.
To find the coefficient of determination, the following Microsoft Excel table for the values of and is used: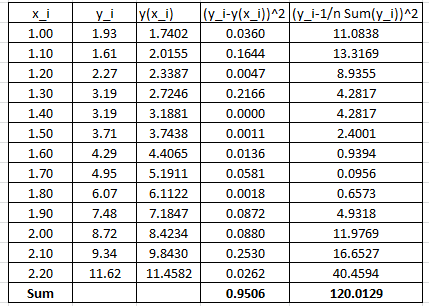
Therefore:
![\[R^2=1-\frac{0.9506}{120.0129}=0.9921\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-bafa92dda4cc9624082bc9008a92256b_l3.png "Rendered by QuickLaTeX.com")
Which is similar to the one produced by Microsoft Excel. Alternatively, the following Mathematica code does the above computations to produce the model and its .
Data = {{1, 1.93}, {1.1, 1.61}, {1.2, 2.27}, {1.3, 3.19}, {1.4,3.19}, {1.5, 3.71}, {1.6, 4.29}, {1.7, 4.95}, {1.8, 6.07}, {1.9,7.48}, {2, 8.72}, {2.1, 9.34}, {2.2, 11.62}};
model = LinearModelFit[Data, {1, x, x^2, x^3}, x]
y = Normal[model]
R2 = model["RSquared"]
Plot[y, {x, 1, 2.2}, Epilog -> {PointSize[Large], Point[Data]}, PlotLegends -> {"Model"}, AxesLabel -> {"x", "y"}, AxesOrigin -> {0, 0} ]
import numpy as np
from scipy import stats
import matplotlib.pyplot as plt
Data = [[1, 1.93], [1.1, 1.61], [1.2, 2.27], [1.3, 3.19], [1.4,3.19], [1.5, 3.71], [1.6, 4.29], [1.7, 4.95], [1.8, 6.07], [1.9,7.48], [2, 8.72], [2.1, 9.34], [2.2, 11.62]]
coeff = np.polyfit([point[0] for point in Data],
[point[1] for point in Data], 3)
print("coeff: ",coeff)
slope, intercept, r_value, p_value, std_err = stats.linregress([point[0] for point in Data],
[point[1] for point in Data])
print("R Squared: ",r_value**2)
y = np.poly1d(coeff)
x = np.linspace(1, 2.2)
plt.plot(x, y(x),label="Model")
y = [str(round(i,4)) for i in list(y)]
plt.title(y[0]+"x**3 + "+y[1]+"x**2 + "+y[2]+"x + "+y[3])
plt.scatter([point[0] for point in Data],[point[1] for point in Data], c='k')
plt.xlabel("x"); plt.ylabel("y")
plt.legend(); plt.grid(); plt.show()
The following links provide the MATLAB codes for implementing the cubic polynomial fit. The function for the model in this example in provided in File2.