
Plane Beam Approximations: Timoshenko Beam
The Timoshenko beam formulation is intentionally derived to better describe beams whose shear deformations cannot be ignored. Short beams are a prime example for such beams, and thus, the Timoshenko beam approximation is better suited to describe their behaviour. The basic physical assumptions behind the Timoshenko beam are similar to those described for the Euler Benroulli beam, except that shear deformations are allowed. The following are the three basic assumptions behind the Timoshenko beam theory. (Compare with those described above for the Euler Bernoulli beam)
- Plane sections perpendicular to the neutral axis before deformations remain plane, but not necessarily perpendicular to the neutral axis after deformation (Figure 6).
- The deformations are small.
- The beam is linear elastic isotropic and Poisson’s ratio effects are ignored.
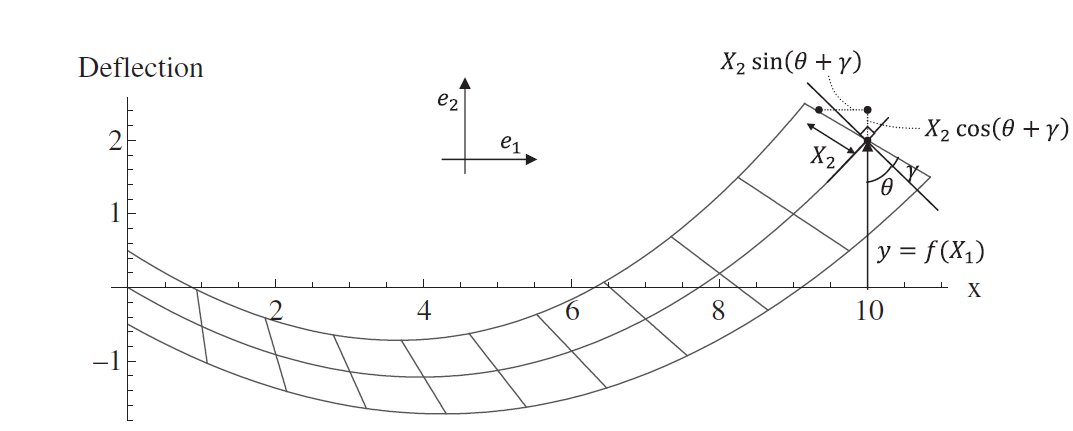
Similar to the Euler Bernoulli beam, the Timoshenko beam is assumed to lie such that its long axis is aligned with  . The deformation is controlled by two functions:
. The deformation is controlled by two functions:  which describes the deformation of the neutral axis (Figure 6) and
which describes the deformation of the neutral axis (Figure 6) and  which describes the shear rotation of the cross section. In essence, the total rotation of the cross section is equal to
which describes the shear rotation of the cross section. In essence, the total rotation of the cross section is equal to  . The coordinates of an arbitrary point
. The coordinates of an arbitrary point  before deformation are given by:
before deformation are given by:
![\[X=\left(\begin{array}{c}X_1^p\\X_2^p\\X_3^p\end{array}\right)\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-4db0690cbc563a2a2c2c5f6b6c35ec02_l3.png "Rendered by QuickLaTeX.com")
Ignoring any effect due to Poisson’s ratio, the coordinates of the point after deformation (Figure 6) are given by:
![\[x=\left(\begin{array}{c}X_1^p-X_2^p\sin{(y'+\gamma)}\\y+X_2^p\cos{(y'+\gamma)}\\X_3^p\end{array}\right)\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-83376abc5092f621261c65951cec9b01_l3.png "Rendered by QuickLaTeX.com")
Setting  , the small deformations assumption allows the approximations
, the small deformations assumption allows the approximations  and
and  . Therefore, the displacement function after incorporating the small deformations assumption is given by:
. Therefore, the displacement function after incorporating the small deformations assumption is given by:
![\[u=x-X=\left(\begin{array}{c}-X_2^p\psi\\y\\0\end{array}\right)\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d39d8c5fb0418b69da3799156c4dbcdf_l3.png "Rendered by QuickLaTeX.com")
We can drop the superscript p since this applies to any arbitrary point. We also note that  . Therefore, the displacement function has the form:
. Therefore, the displacement function has the form:
![\[u=x-X=\left(\begin{array}{c}-X_2\psi\\y\\0\end{array}\right)\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-cc570937713703034bdef940ec9f8c2b_l3.png "Rendered by QuickLaTeX.com")
we remind the reader that  and
and  (and hence ) are functions of only. Therefore, The gradient of the displacement matrix is given by:
(and hence ) are functions of only. Therefore, The gradient of the displacement matrix is given by:
![\[\nabla u=\left(\begin{matrix}-X_2\frac{\mathrm{d}\psi}{\mathrm{d}X_1} & -\psi & 0 \\\frac{\mathrm{d}y}{\mathrm{d}X_1} & 0 & 0\\0&0&0\end{matrix}\right)\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-753515de8761c4e3c761b544959984e2_l3.png "Rendered by QuickLaTeX.com")
Therefore, the small strain matrix has the form:
![\[\varepsilon=\frac{1}{2}\left(\nabla u + \nabla u^T\right)=\left(\begin{matrix}-X_2\frac{\mathrm{d}^\psi}{\mathrm{d}X_1} & -\frac{\gamma}{2} & 0 \\-\frac{\gamma}{2} & 0 & 0\\0&0&0\end{matrix}\right)\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a5a41f91a5e3df27d9ec105a9f5ff80b_l3.png "Rendered by QuickLaTeX.com")
In essence, the deformation assumptions result in all of the strain components being zero except for  and
and  . Furthermore, we will look carefully at the variation of on a given cross section. For a given cross section of the beam we have is equal to constant. Therefore, the quantity
. Furthermore, we will look carefully at the variation of on a given cross section. For a given cross section of the beam we have is equal to constant. Therefore, the quantity  is constant on the cross section and therefore is linear in the vertical direction (Figure 2). The value of is equal to zero at the neutral axis
is constant on the cross section and therefore is linear in the vertical direction (Figure 2). The value of is equal to zero at the neutral axis  . The positive convention for \psi and for
. The positive convention for \psi and for  lead to a positive strain below the neutral axis with the maximum positive value
lead to a positive strain below the neutral axis with the maximum positive value  at the bottom fibre of the cross section. The positive convention also leads to a negative strain above the neutral axis with the maximum negative value
at the bottom fibre of the cross section. The positive convention also leads to a negative strain above the neutral axis with the maximum negative value  at the top fibre of the cross section. On the other hand
at the top fibre of the cross section. On the other hand  is constant on the cross section. Using the linear elastic constitutive relationship for the beam material and ignoring Poisson’s ratio lead to the same distribution for
is constant on the cross section. Using the linear elastic constitutive relationship for the beam material and ignoring Poisson’s ratio lead to the same distribution for  (Figure 2). Therefore, the normal stress component distribution on the cross section is given by:
(Figure 2). Therefore, the normal stress component distribution on the cross section is given by:
(7) 
The internal bending moment on the cross section can be obtained using the integral:
(8) 
The shear stress distribution on the cross section is given by:
![\[\sigma_{12}=kG(2\varepsilon_{12})=-kG\gamma\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9fe1610be09135b1f7932f37b82789bb_l3.png "Rendered by QuickLaTeX.com")
where  is the shear modulus and
is the shear modulus and  is a constant introduced to allow for averaging or smearing the shear stress over the full cross section. was introduced by Timoshenko in his book. For more information on you can view this reference. The shear force is the integral of this average
is a constant introduced to allow for averaging or smearing the shear stress over the full cross section. was introduced by Timoshenko in his book. For more information on you can view this reference. The shear force is the integral of this average  over the cross section which yields:
over the cross section which yields:
![\[V=\int\int \! -\sigma_{12} \, \mathrm{d}X_2\mathrm{d}X_3=\int\int \! kG\gamma \, \mathrm{d}X_2\mathrm{d}X_3=kA G\gamma\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-81ef72af49e2cf413e5ac78f53701f34_l3.png "Rendered by QuickLaTeX.com")
In essence, the term  gives the corresponding “effective” shear area such that the shear stress is equal to
gives the corresponding “effective” shear area such that the shear stress is equal to  .
.
Equilibrium Equations:
The equilibrium Equation 4 developed for the Eulber Bernoulli beam also applies to the Timoshenko beam (Figure 4). By substituting for  using Equation 8 in the equilibrium equations, we reach:
using Equation 8 in the equilibrium equations, we reach:
(9) 
We also have the following differential equation in terms of the beam displacement :
![\[y'=\psi-\gamma\Rightarrow y'=\frac{\mathrm{d}y}{\mathrm{d}X_1}=\psi - \frac{V}{kAG}\Rightarrow\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-810f6ac3d6ae3641e1b0f3a0b12fc8dd_l3.png "Rendered by QuickLaTeX.com")
(10) 
The solution for y and \psi have the following forms:
![\[\begin{split}EI\psi & =\int\int\int \!q \, \mathrm{d}X_1 \mathrm{d}X_1 \mathrm{d}X_1 + C_1\frac{X_1^2}{2}+C_2X_1+C_3\\EI y & =\int\int\int\int \!q \, \mathrm{d}X_1 \mathrm{d}X_1 \mathrm{d}X_1\mathrm{d}X_1+C_1\frac{X_1^3}{6}+C_2\frac{X_1^2}{2}+C_3X_1+C_4\\& -\frac{EI}{kAG}\left(\int\int \!q \, \mathrm{d}X_1 \mathrm{d}X_1+C_1X_1\right) \end{split}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-83220a893f4c5dc82aa86c2d72b55882_l3.png "Rendered by QuickLaTeX.com")
The above two equations (Equation 9 and Equation 10) can be solved if four boundary conditions for the cross section rotation  , the moment
, the moment  , the shear
, the shear  , and/or the displacement are available. At least one boundary condition for y has to be given in order to find the integration constant
, and/or the displacement are available. At least one boundary condition for y has to be given in order to find the integration constant  . Note that if
. Note that if  then the Timoshenko beam solution would approach the Euler Bernoulli beam solution.
then the Timoshenko beam solution would approach the Euler Bernoulli beam solution.