
Displacement and Strain: Description of Motion and Simple Examples
Learning Outcomes
- Define the mathematical description of motion as a mathematical function that relates the material points of an object in an “undeformed” or “pre-deformed” state to its “deformed” state.
- Identify the following examples of deformation functions: Rigid body displacement, rigid body rotation, rigid body motion, Uniform extension and contraction, Simple shear, pure shear.
Description of Motion
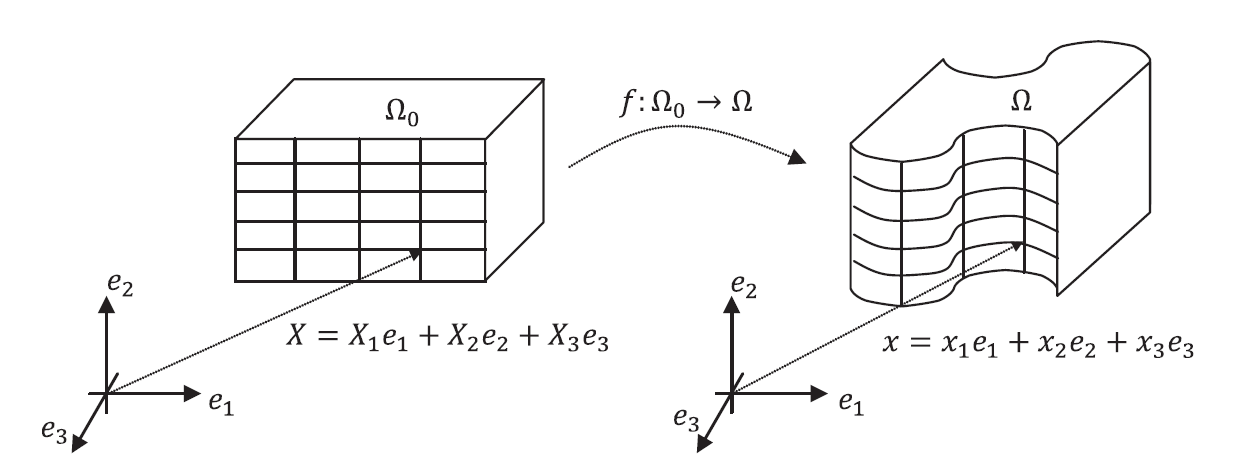
The geometry of a continuum body can be represented mathematically by “embedding” it in a Euclidean Vector Space  where every material point in the body can be represented by a unique vector in the space. We denote the set of vectors corresponding to the material points by
where every material point in the body can be represented by a unique vector in the space. We denote the set of vectors corresponding to the material points by  . The embedding is called a “configuration”. An analyst is usually interested in comparing a “deformed” configuration with an “undeformed” or a “reference” configuration
. The embedding is called a “configuration”. An analyst is usually interested in comparing a “deformed” configuration with an “undeformed” or a “reference” configuration  . Traditionally, elements of the deformed configuration are denoted by
. Traditionally, elements of the deformed configuration are denoted by  while elements in the reference configuration are denoted by
while elements in the reference configuration are denoted by  . The deformed configuration can be assumed to be a function
. The deformed configuration can be assumed to be a function  such that
such that  (Figure 1). In the majority of continuum mechanics applications, the following are the major restrictions on the possible choices of the position function
(Figure 1). In the majority of continuum mechanics applications, the following are the major restrictions on the possible choices of the position function  .
.
-
First, we assume that the deformation between configurations preserves the distinction between material points, i.e., that material is not flattened out or lost during configuration. This restricts
to be bijective. -
Second, we assume that material points don’t change their neighbours, i.e., no cracks or rearrangement of material points occur during deformation. This restricts
to be continuous.
-
In most applications we add the third restriction of being “smooth” or “differentiable” on the possible choices for
. This ensures that straight lines on the reference configuration deform into smooth curves in the deformed configuration. This allows the calculation of derivatives and the definition of “strain”.
The displacement function of the body (termed the displacement field) is denoted by the function  such that:
such that:
![\[\emph{u(X) = x - X = f(x) - X}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-58d114f5208f62566b11fd3f772ad088_l3.png "Rendered by QuickLaTeX.com")
 is the set of vectors representing the reference configuration, while
is the set of vectors representing the reference configuration, while  is the set representing the deformed configuration
is the set representing the deformed configuration A geometric object is embedded in is the set of vectors representing the reference configuration, while is the set representing the deformed configuration.
In the following section a few simple examples of deformations along with their position and displacement functions are presented.
Rigid Body Displacement
A rigid body displacement is represented by a constant displacement vector at every point. The new (deformed) position  of every point is related to the old (reference) position
of every point is related to the old (reference) position  as follows:
as follows:
![\[\emph{ x = X + c}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-de4ff764c4709f1c83babac1b1c95409_l3.png "Rendered by QuickLaTeX.com")
where
![\[\emph{c} \hspace{2mm} \in \hspace{2mm} \mathbb{R}^3\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d0ca46287a2979344f50322c4761186c_l3.png "Rendered by QuickLaTeX.com")
is a constant vector. The displacement field at every point is the difference between the deformed and reference positions and is constant:
![\[\emph{ u = x - X = c}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-4d7e898d1b10f22a4deecf6132f4ba76_l3.png "Rendered by QuickLaTeX.com")
Change the components of the vector  in the following tool to view its effect on the displacement of the cuboid.
in the following tool to view its effect on the displacement of the cuboid.
Rigid Body Rotation
A rigid body rotation is represented by a rotation matrix  ( see Orthogonal Tensors ) such that the new (deformed) position of every point is equal to the rotation matrix Q multiplied by the old (reference) position as follows:
( see Orthogonal Tensors ) such that the new (deformed) position of every point is equal to the rotation matrix Q multiplied by the old (reference) position as follows:
![\[\emph{x = QX}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-bce30747711d60518e2743b456e6e7a8_l3.png "Rendered by QuickLaTeX.com")
The displacement field at every point is the difference between the deformed and reference positions:
![\[\emph{u = x - X = QX - X = (Q-I)X}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-43ce0a96867031a9add556bd7474ab26_l3.png "Rendered by QuickLaTeX.com")
Recall that any rotation matrix can be viewed as consecutive rotations around each of the basis vectors of the coordinate system. Clockwise rotations with angles  around the basis vectors
around the basis vectors  ,
,  and
and  are given by the following matrices
are given by the following matrices  ,
,  and
and  , respectively:
, respectively:
![\[Q_a = \begin{pmatrix} 1 & 0 & 0 \\ 0 & \cos(\theta_a) & \sin(\theta_a) \\ 0 & -\sin(\theta_a) & cos(\theta_a) \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-46ebe2f48f32f4c8bc9e1c2e56840059_l3.png "Rendered by QuickLaTeX.com")
![\[Q_b = \begin{pmatrix} \cos(\theta_b) & 0 & -\sin(\theta_b) \\ 0 & 1 & 0 \\ \sin(\theta_b) & 0 & cos(\theta_b) \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-10a1dd7c28a043ae401cdaed74151699_l3.png "Rendered by QuickLaTeX.com")
![\[Q_c = \begin{pmatrix} \cos(\theta_c) & \sin(\theta_c) & 0 \\ -\sin(\theta_c) & \cos(\theta_c) & 0 \\ 0 & 0 & 1 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-2cc684de65c0bcbfb483fc189c26689b_l3.png "Rendered by QuickLaTeX.com")
It is important to notice that the order of rotation changes the final position of the rotated object. The rotation matrix  describes a rotation of
describes a rotation of  around followed by a rotation of
around followed by a rotation of  around and finally a rotation of
around and finally a rotation of  around . On the other hand, the rotation matrix
around . On the other hand, the rotation matrix  describes a rotation of around followed by a rotation of around and finally a rotation of around . In general:
describes a rotation of around followed by a rotation of around and finally a rotation of around . In general:  . In the following example, the red box represents the original box after rotation around the basis vectors. Try it out: rotate the box 90 degrees around
. In the following example, the red box represents the original box after rotation around the basis vectors. Try it out: rotate the box 90 degrees around  and then slowly rotate it around
and then slowly rotate it around  . This order is applied to the image on the left. The order of rotation applied to the one on the right is reversed! Compare the two orders of rotation. The overall matrix of transformation is displayed at the bottom of each image.
. This order is applied to the image on the left. The order of rotation applied to the one on the right is reversed! Compare the two orders of rotation. The overall matrix of transformation is displayed at the bottom of each image.
Rigid Body Motion
A rigid body motion is a combination of both a rigid body displacement and a rigid body rotation such that the deformed position is function of the reference position as follows:
![\[\emph{x = QX + c}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d68d177ed0763bc0d89cbc341c366bcf_l3.png "Rendered by QuickLaTeX.com")
where  is a rotation matrix and
is a rotation matrix and  is a vector representing the rigid body displacement. The displacement field can be expressed as:
is a vector representing the rigid body displacement. The displacement field can be expressed as:
![\[\emph{u = x - X = (Q-I)X + c}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-14ae597100846d4839bdd8d568037dae_l3.png "Rendered by QuickLaTeX.com")
and 
can be written as follows:
![\[\begin{pmatrix} x_1 \\ x_2 \\ x_3 \\ \end{pmatrix} = \begin{pmatrix} Q_{11} & Q_{12} & Q_{13} \\ Q_{21} & Q_{22} & Q_{23} \\ Q_{31} & Q_{32} & Q_{33} \\ \end{pmatrix} \begin{pmatrix} X_1 \\ X_2 \\ X_3 \\ \end{pmatrix} + \begin{pmatrix} c_1 \\ c_2 \\ c_3 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f66eac5e312aea04d5d610961816b35d_l3.png "Rendered by QuickLaTeX.com")
Note that in some numerical analysis software and tools, the above relationship adopts the following form:
![\[\begin{pmatrix} x_1 \\ x_2 \\ x_3 \\ 1 \\ \end{pmatrix} = \begin{pmatrix} Q_{11} & Q_{12} & Q_{13} & c_1 \\ Q_{21} & Q_{22} & Q_{23} & c_2 \\ Q_{31} & Q_{32} & Q_{33} & c_3 \\ 0 & 0 & 0 & 1 \\ \end{pmatrix} \begin{pmatrix} X_1 \\ X_2 \\ X_3 \\ 1 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-131b516902ea14d0e2a23e354b4ec755_l3.png "Rendered by QuickLaTeX.com")
Change the angles of rotation and the components of the vector  in the following tool to see the effect on the final position of the cube.
in the following tool to see the effect on the final position of the cube.
Uniform Extension and Contraction
A uniform extension or contraction can be characterized by three positive parameters  ,
,  , and
, and  that represent the ratios between the three vector components in the deformed configuration to the components in the reference configuration:
that represent the ratios between the three vector components in the deformed configuration to the components in the reference configuration:
![\[\begin{pmatrix} x_1 \\ x_2 \\ x_3 \\ \end{pmatrix} = \begin{pmatrix} k_1 & 0 & 0 \\ 0 & k_2 & 0 \\ 0 & 0 & k_3 \\ \end{pmatrix} \begin{pmatrix} X_1 \\ X_2 \\ X_3 \\ \end{pmatrix} = \begin{pmatrix} k_1 X_1 \\ k_2 X_2 \\ k_3 X_3 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-be27f5ea527b0cf431225d9aa1f1e86d_l3.png "Rendered by QuickLaTeX.com")
Note that the relationship can be written as a linear transformation  where
where  has the form:
has the form:
![\[M = \begin{pmatrix} k_1 & 0 & 0 \\ 0 & k_2 & 0 \\ 0 & 0 & k_3 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a24d44e35cc1e8d5096450e54fc8bae0_l3.png "Rendered by QuickLaTeX.com")
In the following example, you can vary the values of ,
,and  to see the effect on the deformation of a cube. What values constitute compression and what values constitute tension? Also, what does it mean that the value of
to see the effect on the deformation of a cube. What values constitute compression and what values constitute tension? Also, what does it mean that the value of  is equal to 1 or 0?
is equal to 1 or 0?
Simple Shear
The simple shear motion is described by a shearing angle along a certain direction and perpendicular to another direction. The following relationship describes a simple shear motion in which the planes parallel to the basis vectors and are sheared in the direction of :
![\[\begin{pmatrix} x_1 \\ x_2 \\ x_3 \\ \end{pmatrix} = \begin{pmatrix} 1 & \tan(\theta) & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{pmatrix} \begin{pmatrix} X_1 \\ X_2 \\ X_3 \\ \end{pmatrix} = \begin{pmatrix} X_1 + \tan(\theta)X_2 \\ X_2 \\ X_3 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9591f864c60f173b2d725120ddacafaa_l3.png "Rendered by QuickLaTeX.com")
Note that the relationship can be written as a linear transformation
 where Note that the relationship can be written as a linear transformation has the form:
where Note that the relationship can be written as a linear transformation has the form:
![\[M = \begin{pmatrix} 1 & \tan(\theta) & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-293e5801742c6046b0926e110d43a222_l3.png "Rendered by QuickLaTeX.com")
In the following example, change the values of  ,
,  and
and  in the matrix
in the matrix  :
:
![\[M = \begin{pmatrix} 1 & \tan(\theta_{xy}) & \tan(\theta_{xz}) \\ 0 & 1 & \tan(\theta_{yz}) \\ 0 & 0 & 1 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-72d78d657c2b5d9d69f66602f010defd_l3.png "Rendered by QuickLaTeX.com")
and observe the effect on the deformation . The term simple shear applies to the deformations when only one of the angles , , and is non-zero.
Pure Shear
The following relationship describes a pure shear motion with an angle  in the plane of and :
in the plane of and :
![\[\begin{pmatrix} x_1 \\ x_2 \\ x_3 \\ \end{pmatrix} = \begin{pmatrix} 1 & \tan(\theta/2) & 0 \\ \tan(\theta/2) & 1 & 0 \\ 0 & 0 & 1 \\ \end{pmatrix} \begin{pmatrix} X_1 \\ X_2 \\ X_3 \\ \end{pmatrix} = \begin{pmatrix} X_1 + \tan(\theta/2)X_2 \\ \tan(\theta/2)X_1 + X_2 \\ X_3 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b1f310d67b692a862fc736130b68c6f9_l3.png "Rendered by QuickLaTeX.com")
Note that the relationship can be written as a linear transformation where has the form:
![\[M = \begin{pmatrix} 1 & \tan(\theta/2) & 0 \\ \tan(\theta/2) & 1 & 0 \\ 0 & 0 & 1 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-8c83e144decf36c8c37fc9dc65063dac_l3.png "Rendered by QuickLaTeX.com")
The difference between pure shear and simple shear can be viewed in the following two dimensional example. Change the value of to see the deformation of a rectangle under pure shear (on the left) and under simple shear (on the right). The matrix in each case is given underneath the figure:
In the following example, change the values of , , and in the matrix :
![\[M = \begin{pmatrix} 1 & \tan(\theta_{xy/2}) & \tan(\theta_{xz/2}) \\ \tan(\theta_{xy/2}) & 1 & \tan(\theta{yz/2}) \\ \tan(\theta_{xz/2}) & t\tan(\theta_{yz/2}) & 1 \\ \end{pmatrix}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-df044d0460f9459a33da7c55e1de86c4_l3.png "Rendered by QuickLaTeX.com")
and observe the effect on the deformation . The term pure shear applies to the deformations when only one of the angles , ,and is non-zero.
The definition of the displacement function is f(X) – X (the former X being a capital letter).
Dear Sir/Madam,
Thank you so much for your awesome eBook.
I have some confusion regarding the rotation angle in your example above. Does your example about the rotation angle follow the rule for clockwise and counterclockwise directions?
I have checked it and found that it may not follow this rule. Could you please check and clarify?
Thank you so much.
Best regards,
Tam
Which example?