
Approximate Methods: The Rayleigh Ritz Method: Euler Bernoulli Beams under Lateral Loading
Learning Outcomes
- Describe the steps required to find an approximate solution for a beam system (and the extension to a continuum) using the Rayleigh Ritz method. (Step1: Assume a displacement function, apply the BC. Step 2: Write the expression for the PE of the system. Step 3: Find the minimizers of the PE of the system.)
- Employ the RR method to compute an approximate solution for the displacement in an Euler Bernoulli beam(and the extension to a continuum).
- Differentiate between the requirement for an approximate solution and an exact solution.
Euler Bernoulli Beams under Lateral Loading
For plane Euler Bernoulli beams under lateral loading, the unknown displacement function is  . In this case, the potential energy of the system has the following form (See Euler Bernoulli Beam and energy expressions):
. In this case, the potential energy of the system has the following form (See Euler Bernoulli Beam and energy expressions):
![\[ PE=\mbox{Total Strain Energy} - W=\int\!\frac{EI}{2}\left(\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}\right)^2 \,\mathrm{d}X_1 - W \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-24e2f6b1d591a498c1e059b8d5d29918_l3.png "Rendered by QuickLaTeX.com")
 is Young’s modulus,
is Young’s modulus,  is the moment of inertia, and
is the moment of inertia, and  is the work done by all the external forces acting on the bar (concentrated forces and distributed loads). A few examples to solve for the displacements, rotations, shear forces, and moments for an Euler Bernoulli beam under lateral loading are presented in this section. Similar to the previous section, the Rayleigh Ritz method starts by choosing a form for the displacement function. This form has to satisfy the “essential” boundary conditions, which for this particular type of problems are those boundary conditions imposed on the displacements and the rotations. The following examples show the method for different external loads, and beam configurations.
is the work done by all the external forces acting on the bar (concentrated forces and distributed loads). A few examples to solve for the displacements, rotations, shear forces, and moments for an Euler Bernoulli beam under lateral loading are presented in this section. Similar to the previous section, the Rayleigh Ritz method starts by choosing a form for the displacement function. This form has to satisfy the “essential” boundary conditions, which for this particular type of problems are those boundary conditions imposed on the displacements and the rotations. The following examples show the method for different external loads, and beam configurations.
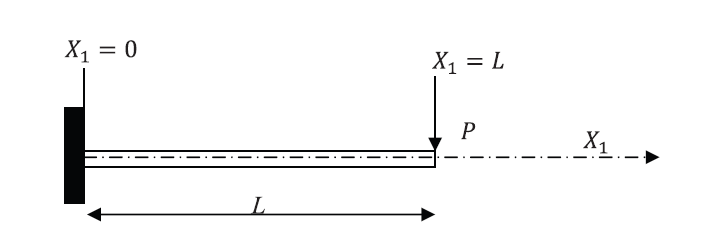
Example 1: Cantilever Beam
Let a beam with a length  and a constant cross sectional parameters area
and a constant cross sectional parameters area  and moment of inertia be aligned with the coordinate axis
and moment of inertia be aligned with the coordinate axis  . Assume that the beam is subjected to a constant force of value
. Assume that the beam is subjected to a constant force of value  applied at the end
applied at the end  in the direction shown in the figure. Assume that the bar is fixed (rotation and displacement are equal to zero) at the end
in the direction shown in the figure. Assume that the bar is fixed (rotation and displacement are equal to zero) at the end  . Find the displacement, rotation, bending moment, and shearing forces on the beam by directly solving the differential equation of equilibrium and then using the Rayleigh Ritz method assuming polynomials of the degrees (0,1, 2, 3, and 4). Assume the beam to be linear elastic with Young’s modulus and that the Euler Bernoulli Beam is an appropriate beam approximation.
. Find the displacement, rotation, bending moment, and shearing forces on the beam by directly solving the differential equation of equilibrium and then using the Rayleigh Ritz method assuming polynomials of the degrees (0,1, 2, 3, and 4). Assume the beam to be linear elastic with Young’s modulus and that the Euler Bernoulli Beam is an appropriate beam approximation.
Solution
Exact Solution:
First, the exact solution that would satisfy the equilibrium equations can be obtained. The equilibrium equation as shown in the Euler Bernoulli beam section when and are constant is:
![\[ EI\frac{\mathrm{d}^4y}{\mathrm{d}X_1^4}=q \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9c3fb7ce3475ecc398b62d9a9b8755a4_l3.png "Rendered by QuickLaTeX.com")
 and therefore the exact solution for the displacement has the form:
and therefore the exact solution for the displacement has the form:
![\[ y=\frac{C_1X_1^3}{6}+\frac{C_2X_1^2}{2}+C_3X_1+C_4 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c08ebdf75ad1c523d6ace0c5c86be566_l3.png "Rendered by QuickLaTeX.com")
![\[ \begin{split} & @X_1=0:y=0\Rightarrow C_4=0\\ & @X_1=0:\theta=\frac{\mathrm{d}y}{\mathrm{d}X_1}=0\Rightarrow C_3=0\\ & @X_1=L:M=0\Rightarrow EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}=0\Rightarrow C_2=-C_1L\\ & @X_1=L:V=P\Rightarrow EI\frac{\mathrm{d}^3y}{\mathrm{d}X_1^3}=P\Rightarrow C_1=\frac{P}{EI} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-8ffc11184bb7c6c88d84b97cb6fc25e6_l3.png "Rendered by QuickLaTeX.com")
, the rotation  , the moment
, the moment  , and the shear
, and the shear  are:
are:
![\[\begin{split} y & =\frac{PX_1^3}{6EI}-\frac{PLX_1^2}{2EI}\\ \theta & = \frac{\mathrm{d}y}{\mathrm{d}X_1}=\frac{PX_1^2}{2EI}-\frac{PLX_1}{EI}\\ M & = EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}=PX_1-PL\\ V & = EI\frac{\mathrm{d}^3y}{\mathrm{d}X_1^3}=P \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1406fdfd710bdcf7a41403354afa3d68_l3.png "Rendered by QuickLaTeX.com")
The Rayleigh Ritz Method:
The first step in the Rayleigh Ritz method finds the minimizer of the potential energy of the system which can be written as:
![\[ PE=\int\!\overline{U}\,dX - W=\int_0^L\!\frac{EI}{2}\left(\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}\right)^2 \,\mathrm{d}X_1 - (-P)y|_{X_1=L} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-218a48e81289c3709eac1bfe60873405_l3.png "Rendered by QuickLaTeX.com")
is equal to the product of – ( is acting downwards and is assumed upwards) and the displacement evaluated at  . To find an approximate solution, an assumption for the shape or the form of has to be introduced.
. To find an approximate solution, an assumption for the shape or the form of has to be introduced.
Polynomials of the Zero and First Degrees:
If we assume that
is a constant (polynomial of the zero degree) or a linear (polynomial of the first degree) function, and when attempting to satisfy the essential boundary conditions:
![\[\begin{split} @X_1=0 & :y=0\\ @X_1=0 & :\theta=\frac{\mathrm{d}y}{\mathrm{d}X_1}=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f683b8f13932c14bdc76745864f4df6a_l3.png "Rendered by QuickLaTeX.com")
 , which will automatically be rejected.
, which will automatically be rejected.
Polynomial of the Second Degree:
The approximate solution forms for the displacement , the rotation , the moment , and the shear force functions if is assumed to be a polynomial of the second degree are:
![\[ \begin{split} y & =a_2X_1^2+a_1X_1+a_0\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =2a_2X_1+a_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =2EIa_2\\ V &=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-21feaffc80d8073836b60a43dbc54b6c_l3.png "Rendered by QuickLaTeX.com")
![\[ \begin{split} @X_1=0 & :y=0\Rightarrow a_0=0\\ @X_1=0 & :\theta=\frac{\mathrm{d}y}{\mathrm{d}X_1}=0\Rightarrow a_1=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c32ebdc8c59652da42e1d327e262a0de_l3.png "Rendered by QuickLaTeX.com")
 that can be controlled:
that can be controlled:
![\[ \begin{split} y & =a_2X_1^2\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =2a_2X_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =2EIa_2\\ V &=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-300685ef316a1043d97c032d663aaa7e_l3.png "Rendered by QuickLaTeX.com")
![\[ PE=\frac{EI}{2}\int_0^L\!\left(2a_2\right)^2\,\mathrm{d}X_1+P\left(a_2L^2\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-daa1655d925910e8c8790d1b2215b06f_l3.png "Rendered by QuickLaTeX.com")
can be obtained by minimizing the potential energy:
![\[ \frac{\mathrm{d} PE}{\mathrm{d} a_2} =4EILa_2+PL^2=0\Rightarrow a_2=-\frac{PL}{4EI} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ed2eb969f21f2f6b6eb8096efa595433_l3.png "Rendered by QuickLaTeX.com")
along with the corresponding solutions for  , and are given by:
, and are given by:
![\[ \begin{split} y & =-\frac{PLX_1^2}{4EI}\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =-\frac{PLX_1}{2EI}\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =-\frac{PL}{2}\\ V &=EI\frac{\mathrm{d}^3y}{\mathrm{d}X_1^3} =0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e3f4094aaf5dc586f2ba662a35afaf09_l3.png "Rendered by QuickLaTeX.com")
Polynomial of the Third Degree:
The approximate solution forms for the displacement , the rotation , the moment , and the shear force functions if is assumed to be a polynomial of the third degree are:
![\[ \begin{split} y & =a_3X_1^3+a_2X_1^2+a_1X_1+a_0\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =3a_3X_1^2+2a_2X_1+a_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =6EIa_3X_1+2EIa_2\\ V &=6EIa_3 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-2840c25a5af6781766890219f1473cb7_l3.png "Rendered by QuickLaTeX.com")
and  that can be controlled:
that can be controlled:
![\[ \begin{split} y & =a_3X_1^3+a_2X_1^2\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =3a_3X_1^2+2a_2X_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =6EIa_3X_1+2EIa_2\\ V &=6EIa_3 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d649790ec4c627468609c60456955bc4_l3.png "Rendered by QuickLaTeX.com")
![\[ PE=\frac{EI}{2}\int_0^L\!\left(6a_3X_1+2a_2\right)^2\,\mathrm{d}X_1+P\left(a_3L^3+a_2L^2\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-cfceb40018d0fe16c04758009fff1ced_l3.png "Rendered by QuickLaTeX.com")
and can be obtained by minimizing the potential energy:
![\[\begin{split} \frac{\partial PE}{\partial a_2} & =\frac{EI}{2}(8a_2L+12a_3L^2)+PL^2=0\\ \frac{\partial PE}{\partial a_3} & =\frac{EI}{2}(12a_2L^2+24a_3L^3)+PL^3=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-493eedc2db327bdd80ae24bba89a9cae_l3.png "Rendered by QuickLaTeX.com")
![\[ a_2=-\frac{PL}{2EI} \qquad a_3=\frac{P}{6EI} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e1289fea3c167183b94dd312cdaf2d8e_l3.png "Rendered by QuickLaTeX.com")
along with the corresponding solutions for , and are given by:
![\[ \begin{split} y & =\frac{PX_1^3}{6EI}-\frac{PLX_1^2}{2EI}\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =\frac{PX_1^2}{2EI}-\frac{PLX_1}{EI}\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =PX_1-PL\\ V &=EI\frac{\mathrm{d}^3y}{\mathrm{d}X_1^3} =P \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-bc3352eb48f59e7d173647fc29db62f0_l3.png "Rendered by QuickLaTeX.com")
was assumed to be a cubic polynomial and the exact solution is in fact a cubic polynomial. One should note that when the “form” or “shape” of the approximate solution contains the “form” or “shape” of the exact solution, then the Rayleigh Ritz method renders the exact solution! To see this, we are going to try a finer approximation (A polynomial of the fourth degree).
Polynomial of the Fourth Degree:
The approximate solution forms for the displacement , the rotation , the moment , and the shear force functions if is assumed to be a polynomial of the fourth degree are:
![\[ \begin{split} y & =a_4X_1^4+a_3X_1^3+a_2X_1^2+a_1X_1+a_0\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =4a_4X_1^3+3a_3X_1^2+2a_2X_1+a_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =12EIa_4X_1^2+6EIa_3X_1+2EIa_2\\ V &=24EIa_4X_1+6EIa_3 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d8a6fd93bebff3bb0a7968dff0fa14ce_l3.png "Rendered by QuickLaTeX.com")
 , and
, and  that can be controlled:
that can be controlled:
![\[ \begin{split} y & =a_4X_1^4+a_3X_1^3+a_2X_1^2\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =4a_4X_1^3+3a_3X_1^2+2a_2X_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =12EIa_4X_1^2+6EIa_3X_1+2EIa_2\\ V &=24EIa_4X_1+6EIa_3 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-44afdf73eb63a2ed021257261dae596a_l3.png "Rendered by QuickLaTeX.com")
![\[ PE=\frac{EI}{2}\int_0^L\!\left(12a_4X_1^2+6a_3X_1+2a_2\right)^2\,\mathrm{d}X_1+P\left(a_4L^4+a_3L^3+a_2L^2\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6500b08f7ccb2cdd684303b29f5fddaa_l3.png "Rendered by QuickLaTeX.com")
, and can be obtained by minimizing the potential energy:
![\[ \frac{\partial PE}{\partial a_2} =0\qquad \frac{\partial PE}{\partial a_3} =0 \qquad \frac{\partial PE}{\partial a_4} =0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a23a38a4fc66c76050f266eec344b6b8_l3.png "Rendered by QuickLaTeX.com")
![\[ a_2=-\frac{PL}{2EI} \qquad a_3=\frac{P}{6EI} \qquad a_4=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ab366c52d3c6079aa8d0c0a6b2178802_l3.png "Rendered by QuickLaTeX.com")
View Mathematica Code
(*Exact Solution*)Clear[a, x, V, M, P, y, L, EI]
M = EI*D[y[x], {x, 2}];
V = EI*D[y[x], {x, 3}];
th = D[y[x], x];
q = 0;
M1 = M /. x -> 0;
M2 = M /. x -> L;
V1 = V /. x -> 0;
V2 = V /. x -> L;
y1 = y[x] /. x -> 0;
y2 = y[x] /. x -> L;
th1 = th /. x -> 0;
th2 = th /. x -> L;
s = DSolve[{EI*y''''[x] == q, y1 == 0, th1 == 0, V2 == P, M2 == 0}, y,
x];
y = y[x] /. s[[1]]
th = D[y, x]
M = EI*D[y, {x, 2}]
V = EI*D[y, {x, 3}]
(*Second Degree*)
Clear[y, x, M, V, th, EI, PE]
y = a2*x^2
th = D[y, x];
M = EI*D[y, {x, 2}];
V = EI*D[y, {x, 3}];
PE = EI/2*Integrate[D[y, {x, 2}]^2, {x, 0, L}] + P*(y /. x -> L);
Eq2 = D[PE, a2];
Sol = Solve[{Eq2 == 0}, {a2}]
y = y /. Sol[[1]]
th /. Sol[[1]]
FullSimplify[M /. Sol[[1]]]
FullSimplify[V /. Sol[[1]]]
(*Third Degree*)
Clear[y, x, M, V, th, EI, PE]
y = a3*x^3 + a2*x^2
th = D[y, x];
M = EI*D[y, {x, 2}];
V = EI*D[y, {x, 3}];
PE = EI/2*Integrate[D[y, {x, 2}]^2, {x, 0, L}] + P*(y /. x -> L);
Eq1 = D[PE, a3];
Eq2 = D[PE, a2];
Sol = Solve[{Eq1 == 0, Eq2 == 0}, {a3, a2}]
y = y /. Sol[[1]]
th /. Sol[[1]]
FullSimplify[M /. Sol[[1]]]
FullSimplify[V /. Sol[[1]]]
(*Fourth Degree*)
Clear[y, x, M, V, th, EI, PE]
y = a4*x^4 + a3*x^3 + a2*x^2
th = D[y, x];
M = EI*D[y, {x, 2}];
V = EI*D[y, {x, 3}];
PE = EI/2*Integrate[D[y, {x, 2}]^2, {x, 0, L}] + P*(y /. x -> L);
Eq1 = D[PE, a3];
Eq2 = D[PE, a2];
Eq3 = D[PE, a4];
Sol = Solve[{Eq1 == 0, Eq2 == 0, Eq3 == 0}, {a3, a2, a4}]
y = y /. Sol[[1]]
th /. Sol[[1]]
FullSimplify[M /. Sol[[1]]]
FullSimplify[V /. Sol[[1]]]
View Python Code
from sympy import *
import sympy as sp
sp.init_printing(use_latex = "mathjax")
x, EI, P, q, a2, a3, a4 = symbols("x EI P q a_2 a_3 a_4")
display("Exact")
y = Function("y")
th = y(x).diff(x)
M = EI*y(x).diff(x,2)
V = EI*y(x).diff(x,3)
q = 0
M1 = M.subs(x,0)
M2 = M.subs(x,L)
V1 = V.subs(x,0)
V2 = V.subs(x,L)
y1 = y(x).subs(x,0)
y2 = y(x).subs(x,L)
th1 = th.subs(x,0)
th2 = th.subs(x,L)
s = dsolve(EI*y(x).diff(x,4) - q, y(x), ics = {y1:0, th1:0, V2/EI:P/EI, M2/EI:0})
y = s.rhs
th = y.diff(x)
M = EI * y.diff(x,2)
V = EI * y.diff(x,3)
display("y,th,M,V: ", y,th,M,V)
display("Second Degree")
y2 = a2*x**2
PE2 = (EI/2)*integrate(y2.diff(x,2)**2, (x,0,L))+P*y2.subs(x,L)
display("Potential Energy: ", PE2)
Eq2 = PE2.diff(a2)
Sol = solve(Eq2, a2)
display("a2", Sol)
y2 = y2.subs(a2,Sol[0])
th = y2.diff(x)
M = EI * y2.diff(x,2)
V = EI * y2.diff(x,3)
display("y,th,M,V: ", y2,th,M,V)
display("Third Degree")
y3 = a3*x**3+a2*x**2
PE3 = (EI/2)*integrate(y3.diff(x,2)**2, (x,0,L))+P*y3.subs(x,L)
display("Potential Energy: ", PE3)
Eq1_3 = PE3.diff(a3)
Eq2_3 = PE3.diff(a2)
Sol = solve((Eq1_3, Eq2_3), (a2,a3))
display("a2,a3:", Sol)
y3 = y3.subs({a2:Sol[a2], a3:Sol[a3]})
th = y3.diff(x)
M = EI * y3.diff(x,2)
V = EI * y3.diff(x,3)
display("y,th,M,V: ", y3,th,M,V)
display("Fourth Degree")
y4 = a4*x**4+a3*x**3+a2*x**2
PE4 = (EI/2)*integrate(y4.diff(x,2)**2, (x,0,L))+P*y4.subs(x,L)
display("Potential Energy: ", PE4)
Eq1_4 = PE4.diff(a3)
Eq2_4 = PE4.diff(a2)
Eq3_4 = PE4.diff(a4)
Sol = solve((Eq1_4, Eq2_4, Eq3_4), (a2,a3,a4))
display("a2,a3, a4:", Sol)
y4 = y4.subs({a2:Sol[a2], a3:Sol[a3], a4:Sol[a4]})
th = y4.diff(x)
M = EI * y4.diff(x,2)
V = EI * y4.diff(x,3)
display("y,th,M,V: ", y3,th,M,V)
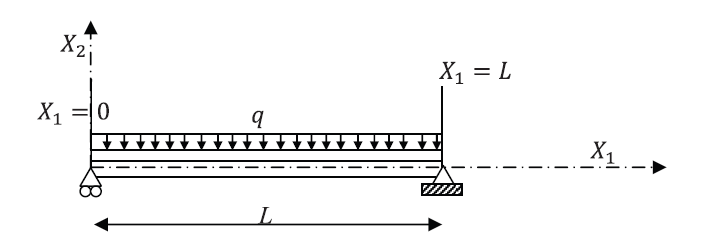
Example 2: Simple Beam
Let a beam with a length  and a constant moment of inertia
and a constant moment of inertia  be aligned with the coordinate axis . Assume that the beam is subjected to a distributed load
be aligned with the coordinate axis . Assume that the beam is subjected to a distributed load  .(Notice that the negative sign was added since
.(Notice that the negative sign was added since  is positive when it is in the direction of positive
is positive when it is in the direction of positive  ). Assume that the beam is hinged at the ends
). Assume that the beam is hinged at the ends  and . Find the displacement, rotation, bending moment, and shearing forces on the beam by directly solving the differential equation of equilibrium and then using the Rayleigh Ritz method assuming polynomials of the degrees (0, 1, 2, 3 and 4). Assume the beam to be linear elastic with Young’s modulus
and . Find the displacement, rotation, bending moment, and shearing forces on the beam by directly solving the differential equation of equilibrium and then using the Rayleigh Ritz method assuming polynomials of the degrees (0, 1, 2, 3 and 4). Assume the beam to be linear elastic with Young’s modulus  and that the Euler Bernoulli Beam is an appropriate beam approximation. Compare the Rayleigh Ritz method with the exact solution.
and that the Euler Bernoulli Beam is an appropriate beam approximation. Compare the Rayleigh Ritz method with the exact solution.
Solution
Exact Solution:
First, the exact solution that would satisfy the equilibrium equations can be obtained. The equilibrium equation as shown in the Euler Bernoulli beam section when and are constant is:
 and therefore the exact solution for the displacement has the form:
and therefore the exact solution for the displacement has the form:
![\[ y=q\frac{X_1^4}{24}+\frac{C_1X_1^3}{6}+\frac{C_2X_1^2}{2}+C_3X_1+C_4 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9d694aa6b14263f28a15c519f6b77743_l3.png "Rendered by QuickLaTeX.com")
![\[ \begin{split} & @X_1=0:y=0\Rightarrow C_4=0\\ & @X_1=0:M=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}=0\Rightarrow C_2=0\\ & @X_1=L:y=0\Rightarrow q\frac{L^4}{24}+\frac{C_1L^3}{6}+C_3L=0\\ & @X_1=L:M=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}=0\Rightarrow q\frac{L^2}{2}+C_1L=0\\ \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-04a435ad0d0b5d2d9aa643877773d5ee_l3.png "Rendered by QuickLaTeX.com")
![\[ C_1=-\frac{qL}{2}\qquad C_3=\frac{qL^3}{24} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-cb0465b9c11bcc02c8d0db1b3c6cdfdc_l3.png "Rendered by QuickLaTeX.com")
, the rotation , the moment , and the shear are:
![\[\begin{split} y & =\frac{qX_1^4}{24EI}-\frac{qLX_1^3}{12EI}+\frac{qL^3X_1}{24EI}\\ \theta & = \frac{\mathrm{d}y}{\mathrm{d}X_1}=\frac{qX_1^3}{6EI}-\frac{qLX_1^2}{4EI}+\frac{qL^3}{24EI}\\ M & = EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}=\frac{qX_1^2}{2}-\frac{qLX_1}{2}\\ V & = EI\frac{\mathrm{d}^3y}{\mathrm{d}X_1^3}=qX_1-\frac{qL}{2} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-80b6f2de189077cff908c81d551e7e7a_l3.png "Rendered by QuickLaTeX.com")
The Rayleigh Ritz Method:
The first step in the Rayleigh Ritz method finds the minimizer of the potential energy of the system which can be written as:
![\[ PE=\int\!\overline{U}\,dX - W=\int_0^L\!\frac{EI}{2}\left(\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}\right)^2 \,\mathrm{d}X_1 - \int_0^L \! qy\,\mathrm{d}X_1 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b4ffbd5a67af2a544b498a5329b3937b_l3.png "Rendered by QuickLaTeX.com")
has to be introduced.
Polynomials of the Zero and First Degrees:
If we assume that
is a constant (polynomial of the zero degree) or a linear (polynomial of the first degree) function, and when attempting to satisfy the essential boundary conditions:
![\[\begin{split} @X_1=0 & :y=0\\ @X_1=L & :y=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6018567efdf5ecf442af26769b6228fd_l3.png "Rendered by QuickLaTeX.com")
, which will automatically be rejected.
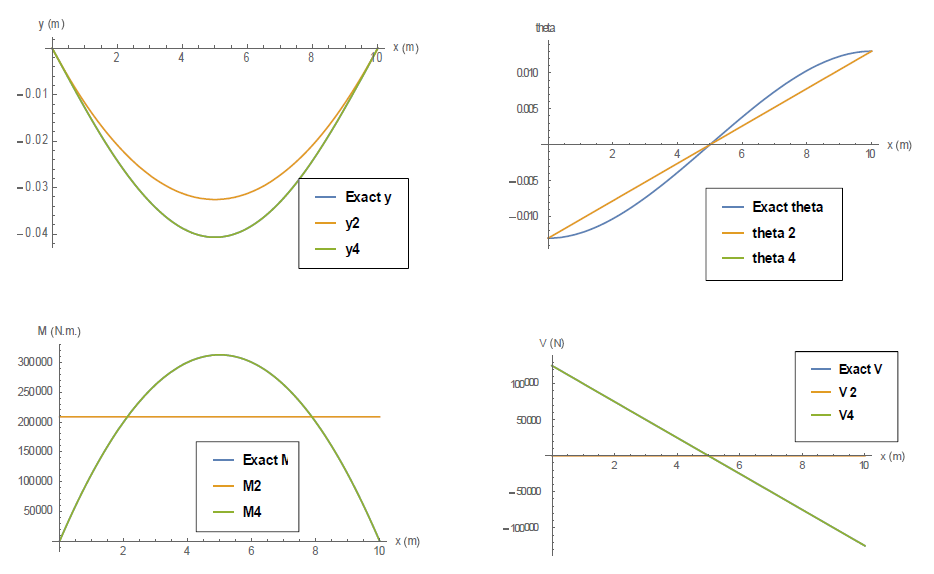
Polynomial of Higher Degrees:
Similar to the previous examples, the coefficients are obtained by first satisfying the essential boundary conditions. Then, the remaining coefficients are obtained by minimizing the potential energy of the system. As shown in the plots below, the second and third degree trial functions give the same result, while the fourth and fifth degree trial functions give the same result. The solution is shown to give the accurate result when a polynomial of the fourth or higher degree is used.
View Mathematica Code
Clear[q,EI,y,x,c1,c2,c3,c4,L]
y=(q*x^4/24+c1*x^3/6+c2*x^2/2+c3*x+c4)/EI;
Eq1=y/.x-> 0;
Eq2=y/.x-> L;
Eq3=EI*D[y,{x,2}]/.x-> 0;
Eq4=EI*D[y,{x,2}]/.x-> L;
a=Solve[{Eq1==0,Eq2==0,Eq3==0,Eq4==0},{c1,c2,c3,c4}];
y=y/.a[[1]];
theta=D[y,x]/.a[[1]];
M=FullSimplify[EI*D[y,{x,2}]/.a[[1]]];
V=FullSimplify[EI*D[y,{x,3}]/.a[[1]]];
(*Second Degree*)
y2=a2*x^2+a1*x+a0;
s=Solve[{(y2/.x-> 0)==0,(y2/.x->L)==0},{a0,a1}];
y2=y2/.s[[1]];
theta2=D[y2,x];
M2=EI*D[y2,{x,2}];
V2=EI*D[y2,{x,3}];
PE=EI/2*Integrate[(D[y2,{x,2}])^2,{x,0,L}]-Integrate[q*y2,{x,0,L}];
Eq1=D[PE,a2];
a=Solve[{Eq1==0},{a2}];
y2=y2/.a[[1]];
theta2=D[y2,x]/.a[[1]];
M2=FullSimplify[EI*D[y2,{x,2}]/.a[[1]]];
V2=FullSimplify[EI*D[y2,{x,3}]/.a[[1]]];
(*Third Degree*)
y3=a3*x^3+a2*x^2+a1*x+a0;
s=Solve[{(y3/.x-> 0)==0,(y3/.x->L)==0},{a0,a1}];
y3=y3/.s[[1]];
theta3=D[y3,x];
M3=EI*D[y3,{x,2}];
V3=EI*D[y3,{x,3}];
PE=EI/2*Integrate[(D[y3,{x,2}])^2,{x,0,L}]-Integrate[q*y3,{x,0,L}];
Eq1=D[PE,a2];
Eq2=D[PE,a3];
a=Solve[{Eq1==0,Eq2==0},{a2,a3}];
y3=y3/.a[[1]];
theta3=D[y3,x]/.a[[1]];
M3=FullSimplify[EI*D[y3,{x,2}]/.a[[1]]];
V3=FullSimplify[EI*D[y3,{x,3}]/.a[[1]]];
(*fourth Degree*)
y4=a4*x^4+a3*x^3+a2*x^2+a1*x+a0;
s=Solve[{(y4/.x-> 0)==0,(y4/.x->L)==0},{a0,a1}];
y4=y4/.s[[1]];
theta4=D[y4,x];
M4=EI*D[y4,{x,2}];
V4=EI*D[y4,{x,3}];
PE=EI/2*Integrate[(D[y4,{x,2}])^2,{x,0,L}]-Integrate[q*y4,{x,0,L}];
Eq1=D[PE,a2];
Eq2=D[PE,a3];
Eq3=D[PE,a4];
a=Solve[{Eq1==0,Eq2==0,Eq3==0},{a2,a3,a4}];
y4=y4/.a[[1]];
theta4=D[y4,x]/.a[[1]];
M4=FullSimplify[EI*D[y4,{x,2}]/.a[[1]]];
V4=FullSimplify[EI*D[y4,{x,3}]/.a[[1]]];
(*fifth Degree*)
y5=a5*x^5+a4*x^4+a3*x^3+a2*x^2+a1*x+a0;
s=Solve[{(y5/.x-> 0)==0,(y5/.x->L)==0},{a0,a1}];
y5=y5/.s[[1]];
theta4=D[y5,x];
M5=EI*D[y5,{x,2}];
V5=EI*D[y5,{x,3}];
PE=EI/2*Integrate[(D[y5,{x,2}])^2,{x,0,L}]-Integrate[q*y5,{x,0,L}];
Eq1=D[PE,a2];
Eq2=D[PE,a3];
Eq3=D[PE,a4];
Eq4=D[PE,a5];
a=Solve[{Eq1==0,Eq2==0,Eq3==0,Eq4==0},{a2,a3,a4,a5}];
y5=y5/.a[[1]];
theta5=D[y5,x]/.a[[1]];
M5=FullSimplify[EI*D[y5,{x,2}]/.a[[1]]];
V5=FullSimplify[EI*D[y5,{x,3}]/.a[[1]]];
EI = 200000*1000000*4*100000000/1000000000000;
q = -25*1000;
L = 10;
Plot[{y,y2,y4},{x,0,L},AxesLabel-> {"x (m)","y (m)"},PlotLegends->{Style["Exact y",Bold,12],Style["y2",Bold,12],Style["y4",Bold,12]}] Plot[{theta,theta2,theta4},{x,0,L},AxesLabel-> {"x (m)","theta"},PlotLegends-> {Style["Exact theta",Bold,12],Style["theta 2",Bold,12],Style["theta 4",Bold,12]}]
Plot[{M,M2,M4},{x,0,L},AxesLabel-> {"x (m)","M (N.m.)"},PlotLegends-> {Style["Exact M",Bold,12],Style["M2",Bold,12],Style["M4",Bold,12]}] Plot[{V,V2,V4},{x,0,L},AxesLabel-> {"x (m)","V (N)"},PlotLegends->{Style["Exact V",Bold,12],Style["V 2",Bold,12],Style["V4",Bold,12]}]
View Python Code
from sympy import *
from numpy import *
import sympy as sp
import numpy as np
import matplotlib.pyplot as plt
sp.init_printing(use_latex = "mathjax")
x, EI, P, q, a0, a1, a2, a3, a4, a5, c1, c2, c3, c4 = symbols("x EI P q a_0 a_1 a_2 a_3 a_4 a_5 c_1 c_2 c_3 c_4")
display("Exact")
y = (q*x**4/24+c1*x**3/6+c2*x**2/2+c3*x+c4)/EI
Eq1 = y.subs(x,0)
Eq2 = y.subs(x,L)
Eq3 = EI * y.diff(x,2).subs(x,0)
Eq4 = EI * y.diff(x,2).subs(x,L)
a = solve((Eq1,Eq2,Eq3,Eq4), (c1,c2,c3,c4))
display("constants: ", a)
y = y.subs({c1:a[c1], c2:a[c2], c3:a[c3], c4:a[c4]})
theta = y.diff(x)
M = EI*y.diff(x,2)
V = EI*y.diff(x,3)
display("y,theta,M,V: ", y,theta,M,V)
display("Second Degree")
y2 = a2*x**2+a1*x+a0
s = solve((y2.subs(x,0), y2.subs(x,L)), (a0, a1))
display("a0, a1", s)
y2 = y2.subs({a0:s[a0], a1:s[a1]})
PE2 = (EI/2)*integrate(y2.diff(x,2)**2, (x,0,L)) - integrate(q*y2, (x,0,L))
display("Potential Energy: ", PE2)
Eq1_2 = PE2.diff(a2)
a = solve(Eq1_2, a2)
y2 = y2.subs(a2,a[0])
theta2 = y2.diff(x)
M2 = EI*y2.diff(x,2)
V2 = EI*y2.diff(x,3)
display("y,theta,M,V: ", y2,theta2,M2,V2)
display("Third Degree")
y3 = a3*x**3+a2*x**2+a1*x+a0
s = solve((y3.subs(x,0), y3.subs(x,L)), (a0, a1))
display("a0, a1", s)
y3 = y3.subs({a0:s[a0], a1:s[a1]})
PE3 = (EI/2)*integrate(y3.diff(x,2)**2, (x,0,L)) - integrate(q*y3, (x,0,L))
display("Potential Energy: ", PE3)
Eq1_3 = PE3.diff(a2)
Eq2_3 = PE3.diff(a3)
a = solve((Eq1_3, Eq2_3), (a2,a3))
y3 = y3.subs({a2:a[a2], a3:a[a3]})
theta3 = y3.diff(x)
M3 = EI*y3.diff(x,2)
V3 = EI*y3.diff(x,3)
display("y,theta,M,V: ", y3,theta3,M3,V3)
display("Fourth Degree")
y4 = a4*x**4+a3*x**3+a2*x**2+a1*x+a0
s = solve((y4.subs(x,0), y4.subs(x,L)), (a0, a1))
display("a0, a1", s)
y4 = y4.subs({a0:s[a0], a1:s[a1]})
PE4 = (EI/2)*integrate(y4.diff(x,2)**2, (x,0,L)) - integrate(q*y4, (x,0,L))
display("Potential Energy: ", PE4)
Eq1_4 = PE4.diff(a2)
Eq2_4 = PE4.diff(a3)
Eq3_4 = PE4.diff(a4)
a = solve((Eq1_4, Eq2_4, Eq3_4), (a2,a3, a4))
y4 = y4.subs({a2:a[a2], a3:a[a3], a4:a[a4]})
theta4 = y4.diff(x)
M4 = EI*y4.diff(x,2)
V4 = EI*y4.diff(x,3)
display("y,theta,M,V: ", y4,theta4,M4,V4)
display("Fifth Degree")
y5 = a5*x**5+a4*x**4+a3*x**3+a2*x**2+a1*x+a0
s = solve((y5.subs(x,0), y5.subs(x,L)), (a0, a1))
display("a0, a1", s)
y5 = y5.subs({a0:s[a0], a1:s[a1]})
PE5 = (EI/2)*integrate(y5.diff(x,2)**2, (x,0,L)) - integrate(q*y5, (x,0,L))
display("Potential Energy: ", PE5)
Eq1_5 = PE5.diff(a2)
Eq2_5 = PE5.diff(a3)
Eq3_5 = PE5.diff(a4)
Eq4_5 = PE5.diff(a5)
a = solve((Eq1_5, Eq2_5, Eq3_5, Eq4_5), (a2,a3,a4,a5))
y5 = y5.subs({a2:a[a2], a3:a[a3], a4:a[a4], a5:a[a5]})
theta5 = y5.diff(x)
M5 = EI*y5.diff(x,2)
V5 = EI*y5.diff(x,3)
display("y,theta,M,V: ", y5,theta5,M5,V5)
# Sub graphed things in
y = y.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
y2 = y2.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
y4 = y4.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
theta = theta.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
theta2 = theta2.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
theta4 = theta4.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
M = M.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
M2 = M2.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
M4 = M4.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
V = V.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
V2 = V2.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
V4 = V4.subs({EI:200000*1000000*4*100000000/1000000000000, L:10, q:-25*100})
#Graph
fig, ax = plt.subplots(2,2, figsize = (10,6))
plt.setp(ax[0,0], xlabel = "x(m) ", ylabel = "y(m)")
plt.setp(ax[0,1], xlabel = "x(m)", ylabel = "theta")
plt.setp(ax[1,0], xlabel = "x(m)", ylabel = "M(N*m)")
plt.setp(ax[1,1], xlabel = "x(m)", ylabel = "V(N)")
x1 = np.arange(0,10.1,0.1)
y_list = [y.subs({x:i}) for i in x1]
y2_list = [y2.subs({x:i}) for i in x1]
y4_list = [y4.subs({x:i}) for i in x1]
theta_list = [theta.subs({x:i}) for i in x1]
theta2_list = [theta2.subs({x:i}) for i in x1]
theta4_list = [theta4.subs({x:i}) for i in x1]
M_list = [M.subs({x:i}) for i in x1]
M2_list = [M2.subs({x:i}) for i in x1]
M4_list = [M4.subs({x:i}) for i in x1]
V_list = [V.subs({x:i}) for i in x1]
V2_list = [V2.subs({x:i}) for i in x1]
V4_list = [V4.subs({x:i}) for i in x1]
ax[0,0].plot(x1, y_list, 'blue', label = "Exact y")
ax[0,0].plot(x1, y2_list, 'orange', label = "y2")
ax[0,0].plot(x1, y4_list, 'green', label = "y4")
ax[0,0].legend()
ax[0,1].plot(x1, theta_list, 'blue', label = "Exact theta")
ax[0,1].plot(x1, theta2_list, 'orange', label = "theta 2")
ax[0,1].plot(x1, theta4_list, 'green', label = "theta 4")
ax[0,1].legend()
ax[1,0].plot(x1, M_list, 'blue', label = "Exact M")
ax[1,0].plot(x1, M2_list, 'orange', label = "M2")
ax[1,0].plot(x1, M4_list, 'green', label = "M4")
ax[1,0].legend()
ax[1,1].plot(x1, V_list, 'blue', label = "Exact V")
ax[1,1].plot(x1, V2_list, 'orange', label = "V2")
ax[1,1].plot(x1, V4_list, 'green', label = "V4")
ax[1,1].legend()
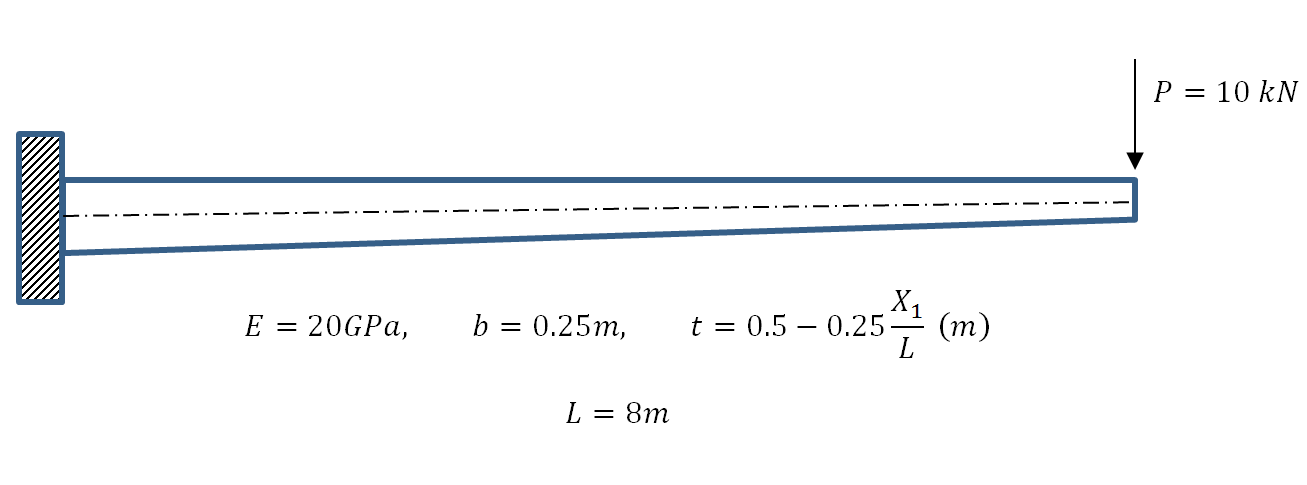
Example 3: Cantilever Beam with a Varying Cross Sectional Area
Let a beam with a length  and with a constant width
and with a constant width  and a linearly varying height (
and a linearly varying height ( and
and  ) be aligned with the coordinate axis . Assume that the beam has a fixed left end and had a shearing load acting downwards of 10kN on its right end. Find the displacement, bending moment, and shearing force on the beam by directly solving the differential equation of equilibrium and then using the Rayleigh Ritz method assuming polynomials of the degrees (0, 1, 2, 3, 4, 5, 6, 7). Assume the beam to be linear elastic with Young’s modulus
) be aligned with the coordinate axis . Assume that the beam has a fixed left end and had a shearing load acting downwards of 10kN on its right end. Find the displacement, bending moment, and shearing force on the beam by directly solving the differential equation of equilibrium and then using the Rayleigh Ritz method assuming polynomials of the degrees (0, 1, 2, 3, 4, 5, 6, 7). Assume the beam to be linear elastic with Young’s modulus  and that the Euler Bernoulli Beam is an appropriate beam approximation. Compare the Rayleigh Ritz method with the exact solution.
and that the Euler Bernoulli Beam is an appropriate beam approximation. Compare the Rayleigh Ritz method with the exact solution.
Solution
Exact Solution:
First, the exact solution that would satisfy the equilibrium equations can be obtained. The equilibrium equation as shown in the Euler Bernoulli beam section apply only when and are constant. Since is variable, the differential equation has the form:
![\[ \frac{\mathrm{d}^2\left(EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}\right)}{\mathrm{d}X_1^2}=q \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6acf250d19d412d5a245e9f13b081ecc_l3.png "Rendered by QuickLaTeX.com")
. For consistency in the units, in all the following calculations  and
and  . The moment of inertia is a function of as follows:
. The moment of inertia is a function of as follows:
![\[ I=\frac{bt^3}{12}=\frac{0.25\left(0.5-0.25\frac{X_1}{8}\right)^3}{12}=\frac{(16-X_1)^3}{1572864} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b0922caabf4e0f5d873728527d8c8e57_l3.png "Rendered by QuickLaTeX.com")
![\[ \begin{split} & @X_1=0:y=0\\ & @X_1=0:\theta=\frac{\mathrm{d}y}{\mathrm{d}X_1}=0\\ & @X_1=L:V=\frac{\mathrm{d}M}{\mathrm{d}X_1}=\frac{\mathrm{d}\left(EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}\right)}{\mathrm{d}X_1}=10000\\ & @X_1=L:M=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2}=0\\ \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c72cd8e5940dd2c8c19ca096e9898d6b_l3.png "Rendered by QuickLaTeX.com")
:
![\[ y=\frac{34.8872+(0.036864X_1-2.96688)X_1+(0.786432X_1-12.5829)\ln[16-X_1]}{X_1-16} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-65a6ba8f1cd1ba4dc742f78a542fc9f9_l3.png "Rendered by QuickLaTeX.com")
![\[ M=-80000+10000X_1\qquad V=10000 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6aa7397acd1cd2503758d98ab4476c30_l3.png "Rendered by QuickLaTeX.com")
. Note that traditionally, in structural engineering applications, a constant cross section with the intermediate height of two thirds of the maximum height can be assumed to simplify the equations.
The Rayleigh Ritz Method:
The first step in the Rayleigh Ritz method finds the minimizer of the potential energy of the system which can be written as:
is equal to the product of - ( is acting downwards and y is assumed upwards) and the displacement evaluated at . To find an approximate solution, an assumption for the shape or the form of has to be introduced.
Polynomials of the Zero and First Degrees:
If we assume that
is a constant (polynomial of the zero degree) or a linear (polynomial of the first degree) function, and when attempting to satisfy the essential boundary conditions:
![\[\begin{split} @X_1=0 & :y=0\\ @X_1=0 & :\theta=\frac{\mathrm{d}y}{\mathrm{d}X_1}=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1d7077306cf0cc705282795f8b4b3af3_l3.png "Rendered by QuickLaTeX.com")
, which will automatically be rejected.
Polynomial of the Second Degree:
The approximate solution forms for the displacement , the rotation , the moment , and the shear force functions if is assumed to be a polynomial of the second degree are:
![\[ \begin{split} y & =a_2X_1^2+a_1X_1+a_0\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =2a_2X_1+a_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =2EIa_2=-\frac{9765625}{384}a_2(-16+X_1)^3\\ V &=\frac{\mathrm{d}M}{\mathrm{d}X_1}=-\frac{9765625}{128}a_2(-16+X_1)^2 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-edc9fcbcf655d759fc9cc66db9531669_l3.png "Rendered by QuickLaTeX.com")
![\[ \begin{split} @X_1=0 & :y=0\Rightarrow a_0=0\\ @X_1=0 & :\theta=\frac{\mathrm{d}y}{\mathrm{d}X_1}=0\Rightarrow a_1=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-7d3cefc86fc2a35030ab49784b69062c_l3.png "Rendered by QuickLaTeX.com")
that can be controlled:
![\[ \begin{split} y & =a_2X_1^2\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =2a_2X_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =2EIa_2=-\frac{9765625}{384}a_2(-16+X_1)^3\\ V &=\frac{\mathrm{d}M}{\mathrm{d}X_1}=-\frac{9765625}{128}a_2(-16+X_1)^2 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-55f1ad5de26481f6528951fb69cb280b_l3.png "Rendered by QuickLaTeX.com")
![\[\begin{split} PE&=\int_0^L\!\frac{EI}{2} \left(2a_2\right)^2\,\mathrm{d}X_1+P\left(a_2L^2\right)=\int_0^L\!\frac{9765625a_2^2(16-X_1)^3}{384}\,\mathrm{d}X_1+640000a_2\\ &=640000a_2+390625000a_2^2 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-3d6a3cfbae0f3c01955d0a3ec47869b8_l3.png "Rendered by QuickLaTeX.com")
is a function of and so it stays inside the integral. The unknown coefficient can be obtained by minimizing the potential energy:
![\[ \frac{\mathrm{d} PE}{\mathrm{d} a_2} =0\Rightarrow a_2=\frac{-64}{78125} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-003c2f1f66d9f695e0bc544f025829a5_l3.png "Rendered by QuickLaTeX.com")
along with the corresponding solutions for and are given by:
![\[ \begin{split} y & =\frac{-64}{78125}X_1^2=-0.0008192X_1^2\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =\frac{125}{6}(X_1-16)^3\\ &=-85333.3 + 16000 X_1 - 1000 X_1^2 + 20.8333 X_1^3\\ V &=\frac{\mathrm{d}M}{\mathrm{d}X_1} =\frac{125}{2}(X_1-16)^2\\ &=16000 - 2000 X_1 + 62.5 X_1^2 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-768ec2778d2976c2614709cfcb3599e7_l3.png "Rendered by QuickLaTeX.com")
The approximate solution forms for the displacement
, the rotation , the moment , and the shear force functions if is assumed to be a polynomial of the third degree are:
![\[ \begin{split} y & =a_3X_1^3+a_2X_1^2+a_1X_1+a_0\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =3a_3X_1^2+2a_2X_1+a_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =6EIa_3X_1+2EIa_2\\ V &=\frac{\mathrm{d}M}{\mathrm{d}X_1} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-2b2a2ac63faa23751616a688a3e318a6_l3.png "Rendered by QuickLaTeX.com")
and that can be controlled:
![\[ \begin{split} y & =a_3X_1^3+a_2X_1^2\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =3a_3X_1^2+2a_2X_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =6EIa_3X_1+2EIa_2=-\frac{9765625}{384}(-16+X_1)^3(a_2+3a_3X_1)\\ V &=-\frac{9765625}{128}(-16+X_1)^2(a_2+4a_3(X_1-4)) \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-58f67b28942e828d2eb0f93428c80f79_l3.png "Rendered by QuickLaTeX.com")
![\[ PE=\int_0^L\!\frac{EI}{2}\left(6a_3X_1+2a_2\right)^2\,\mathrm{d}X_1+P\left(a_3L^3+a_2L^2\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-dd2c0fedbab08ec1279dca0f5d4e8a2b_l3.png "Rendered by QuickLaTeX.com")
and can be obtained by minimizing the potential energy:
![\[\begin{split} \frac{\partial PE}{\partial a_2} & =640000+781250000a_2+6500000000a_3=0\\ \frac{\partial PE}{\partial a_3} & =5120000+6500000000a_2+84000000000a_3=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-cc2884303bf0f873cb3df7cd3b125717_l3.png "Rendered by QuickLaTeX.com")
![\[ a_2=-\frac{512}{584375} \qquad a_3=\frac{4}{584375} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f486491a5728ea201ac41a027c5fefc3_l3.png "Rendered by QuickLaTeX.com")
along with the corresponding solutions for , and are given by:
![\[ \begin{split} y & =\frac{4X_1^3}{584375}-\frac{512X_1^2}{584375}\\ &=-0.00087615X_1^2+6.84492(10)^{-6}X_1^3\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =-\frac{3125(-16+X_1)^3(-128+3X_1)}{17952}\\ &=-91265.6 + 19251.3 X_1 - 1470.59 X_1^2 + 47.3485 X_1^3 - 0.522226 X_1^4\\ V &=\frac{\mathrm{d}M}{\mathrm{d}X_1} =-\frac{3125(-36+X_1)(-16+X_1)^2}{1496}\\ &=19251.3 - 2941.18 X_1 + 142.045 X_1^2 - 2.0889 X_1^3 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-855a045ad64b3c4d59d13480fab3b65a_l3.png "Rendered by QuickLaTeX.com")
Polynomials of the Fourth Degree:
The approximate solution forms for the displacement , the rotation , the moment , and the shear force functions if is assumed to be a polynomial of the fourth degree are:
![\[ \begin{split} y & =a_4X_1^4+a_3X_1^3+a_2X_1^2+a_1X_1+a_0\\ \theta &=\frac{\mathrm{d}y}{\mathrm{d}X_1} =4a_4X_1^3+3a_3X_1^2+2a_2X_1+a_1\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =12EIa_4X_1^2+6EIa_3X_1+2EIa_2\\ V &=\frac{\mathrm{d}M}{\mathrm{d}X_1} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1528b99bb26244444c4c5627f98ddacb_l3.png "Rendered by QuickLaTeX.com")
, and that can be controlled:
![\[ \begin{split} y & =a_4X_1^4+a_3X_1^3+a_2X_1^2\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =12EIa_4X_1^2+6EIa_3X_1+2EIa_2\\ V &=\frac{\mathrm{d}M}{\mathrm{d}X_1} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b2d11b1a04184ae8addada2f0b39b1cb_l3.png "Rendered by QuickLaTeX.com")
![\[ PE=\int_0^L\!\frac{EI}{2}\left(12a_4X_1^2+6a_3X_1+2a_2\right)^2\,\mathrm{d}X_1+P\left(a_4L^4+a_3L^3+a_2L^2\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a3b679a5a9361481f281711712e3c481_l3.png "Rendered by QuickLaTeX.com")
, and can be obtained by minimizing the potential energy:
![\[ a_2=-0.000704051 \qquad a_3=-0.0000484584 \qquad a_4=-4.01821(10)^{-6} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5bad3f5173d1c7230d4bafc7d5da1424_l3.png "Rendered by QuickLaTeX.com")
![\[ \begin{split} y & =-0.000704051X_1^2-0.0000484584X_1^3+4.01821(10)^{-6}X_1^4\\ M &=EI\frac{\mathrm{d}^2y}{\mathrm{d}X_1^2} =-73338.7 - 1392.24 X_1 + 4491.3 X_1^2 - 630.438 X_1^3 + 33.1273 X_1^4 - 0.61313 X_1^5\\ V &=\frac{\mathrm{d}M}{\mathrm{d}X_1}=-1392.24 + 8982.6 X_1 - 1891.32 X_1^2 + 132.509 X_1^3 - 3.06565 X_1^4 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-cba5376a43aa37e4b25f2d99d4d91093_l3.png "Rendered by QuickLaTeX.com")
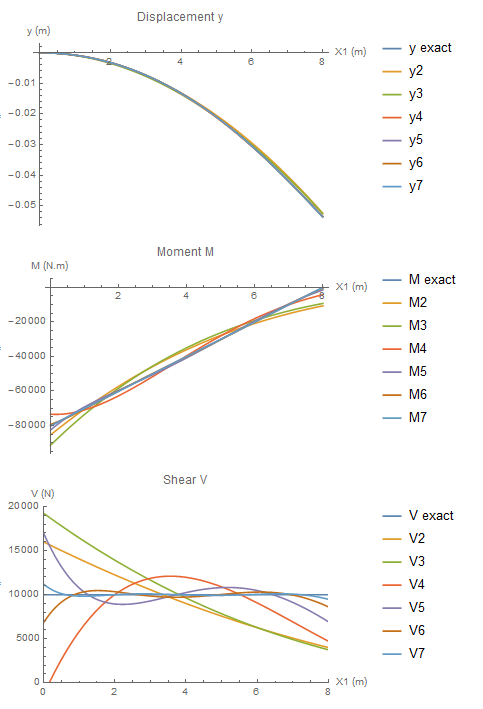
Approximate solutions using higher order polynomials can be obtained similarly. The following plots show the convergence of the polynomial functions to the exact solution up to a polynomial of the sixth degree (Mathematica code is given below). In the first plot, it is clear that a polynomial of the second degree is capable of capturing the displacement quite accurately. However, the corresponding approximate solutions for the moment and shear are not as accurate. The accuracy of the approximate solution for the bending moment is higher than that for the shearing force and that is because the moment is related to the second derivative of while the shear is related to the third derivative of . It takes up to a polynomial of the seventh degree for for the approximate shearing force to have a flat distribution similar to the exact solution.
View Mathematica Code
b = 1/4;
L = 8;
t = (1/2 - 1/4*X1/L);
Ii = b*t^3/12;
Ee = 20*10^9;
P = 10000;
a = DSolve[{D[Ee*Ii*y''[X1], {X1, 2}] == 0, y[0] == 0, y'[0] == 0, y''[L] == 0, (D[Ee*Ii, X1] /. X1 -> L)*y''[L] + (Ee*Ii /. X1 -> L)*y'''[L] == P}, y[X1], X1, Assumptions -> 0 <= X1 <= L]
y = FullSimplify[Chop[N[y[X1] /. a[[1]]]]]
th = D[y, X1];
M = FullSimplify[Ee*Ii*D[y, {X1, 2}]]
V = FullSimplify[D[M, X1]]
Plot[y, {X1, 0, L}, PlotLabel -> "Displacement y", AxesLabel -> {"X1 (m)", "y (m)"}, PlotLegends -> {"y exact"}]
Plot[M, {X1, 0, L}, PlotLabel -> "Moment M", AxesLabel -> {"X1 (m)", "M (N.m)"}, PlotLegends -> {"M exact"}]
Plot[V, {X1, 0, L}, PlotRange -> {{0, L}, {0, 2 P}}, PlotLabel -> "Shear V", AxesLabel -> {"X1 (m)", "V (N)"}, PlotLegends -> {"V exact"}]
Print["Second Order Polynomial"]
y2 = a2*X1^2;
d2y = D[y2, {X1, 2}];
PE = Integrate[Ee*Ii/2*d2y^2, {X1, 0, L}] - (-P)*y2 /. X1 -> L;
sol = Solve[D[PE, a2] == 0, a2]
y2 = y2 /. sol[[1]]
M2 = FullSimplify[Ee*Ii*D[y2, {X1, 2}]]
V2 = FullSimplify[D[M2, X1]]
Plot[{y, y2}, {X1, 0, L}, PlotLabel -> "Displacement y", AxesLabel -> {"X1 (m)", "y (m)"}, PlotLegends -> {"y exact", "y2"}]
Plot[{M, M2}, {X1, 0, L}, PlotLabel -> "Moment M", AxesLabel -> {"X1 (m)", "M (N.m)"}, PlotLegends -> {"M exact", "M2"}]
Plot[{V, V2}, {X1, 0, L}, PlotRange -> {{0, L}, {0, 2 P}}, PlotLabel -> "Shear V", AxesLabel -> {"X1 (m)", "V (N)"}, PlotLegends -> {"V exact", "V2"}]
Print["Third Order Polynomial"]
y3 = a2*X1^2 + a3*X1^3;
d2y = D[y3, {X1, 2}];
PE = Integrate[Ee*Ii/2*d2y^2, {X1, 0, L}] - (-P)*y3 /. X1 -> L;
sol = Solve[{D[PE, a2] == 0, D[PE, a3] == 0}, {a2, a3}]
y3 = y3 /. sol[[1]]
M3 = FullSimplify[Ee*Ii*D[y3, {X1, 2}]]
V3 = FullSimplify[D[M3, X1]]
Plot[{y, y3}, {X1, 0, L}, PlotLabel -> "Displacement y", AxesLabel -> {"X1 (m)", "y (m)"}, PlotLegends -> {"y exact", "y3"}]
Plot[{M, M3}, {X1, 0, L}, PlotLabel -> "Moment M", AxesLabel -> {"X1 (m)", "M (N.m)"}, PlotLegends -> {"M exact", "M3"}]
Plot[{V, V3}, {X1, 0, L}, PlotRange -> {{0, L}, {0, 2 P}}, PlotLabel -> "Shear V", AxesLabel -> {"X1 (m)", "V (N)"}, PlotLegends -> {"V exact", "V3"}]
Print["Fourth Order Polynomial"]
y4 = a2*X1^2 + a3*X1^3 + a4*X1^4;
d2y = D[y4, {X1, 2}];
PE = Integrate[Ee*Ii/2*d2y^2, {X1, 0, L}] - (-P)*y4 /. X1 -> L;
sol = Solve[{D[PE, a2] == 0, D[PE, a3] == 0, D[PE, a4] == 0}, {a2, a3, a4}]
y4 = y4 /. sol[[1]]
M4 = FullSimplify[Ee*Ii*D[y4, {X1, 2}]]
V4 = FullSimplify[D[M4, X1]]
Plot[{y, y4}, {X1, 0, L}, PlotLabel -> "Displacement y", AxesLabel -> {"X1 (m)", "y (m)"}, PlotLegends -> {"y exact", "y4"}]
Plot[{M, M4}, {X1, 0, L}, PlotLabel -> "Moment M", AxesLabel -> {"X1 (m)", "M (N.m)"}, PlotLegends -> {"M exact", "M4"}]
Plot[{V, V4}, {X1, 0, L}, PlotRange -> {{0, L}, {0, 2 P}}, PlotLabel -> "Shear V", AxesLabel -> {"X1 (m)", "V (N)"}, PlotLegends -> {"V exact", "V4"}]
Print["Fifth Order Polynomial"]
y5 = a2*X1^2 + a3*X1^3 + a4*X1^4 + a5*X1^5;
d2y = D[y5, {X1, 2}];
PE = Integrate[Ee*Ii/2*d2y^2, {X1, 0, L}] - (-P)*y5 /. X1 -> L; sol = Solve[{D[PE, a2] == 0, D[PE, a3] == 0, D[PE, a4] == 0, D[PE, a5] == 0}, {a2, a3, a4, a5}]
y5 = y5 /. sol[[1]]
M5 = FullSimplify[Ee*Ii*D[y5, {X1, 2}]]
V5 = FullSimplify[D[M5, X1]]
Plot[{y, y5}, {X1, 0, L}, PlotLabel -> "Displacement y", AxesLabel -> {"X1 (m)", "y (m)"}, PlotLegends -> {"y exact", "y5"}]
Plot[{M, M5}, {X1, 0, L}, PlotLabel -> "Moment M", AxesLabel -> {"X1 (m)", "M (N.m)"}, PlotLegends -> {"M exact", "M5"}]
Plot[{V, V5}, {X1, 0, L}, PlotRange -> {{0, L}, {0, 2 P}}, PlotLabel -> "Shear V", AxesLabel -> {"X1 (m)", "V (N)"}, PlotLegends -> {"V exact", "V5"}]
Print["Sixth Order Polynomial"]
y6 = a2*X1^2 + a3*X1^3 + a4*X1^4 + a5*X1^5 + a6*X1^6;
d2y = D[y6, {X1, 2}];
PE = Integrate[Ee*Ii/2*d2y^2, {X1, 0, L}] - (-P)*y6 /. X1 -> L; sol = Solve[{D[PE, a2] == 0, D[PE, a3] == 0, D[PE, a4] == 0, D[PE, a5] == 0, D[PE, a6] == 0}, {a2, a3, a4, a5, a6}]
y6 = y6 /. sol[[1]]
M6 = FullSimplify[Ee*Ii*D[y6, {X1, 2}]]
V6 = FullSimplify[D[M6, X1]]
Plot[{y, y6}, {X1, 0, L}, PlotLabel -> "Displacement y", AxesLabel -> {"X1 (m)", "y (m)"}, PlotLegends -> {"y exact", "y6"}]
Plot[{M, M6}, {X1, 0, L}, PlotLabel -> "Moment M", AxesLabel -> {"X1 (m)", "M (N.m)"}, PlotLegends -> {"M exact", "M6"}]
Plot[{V, V6}, {X1, 0, L}, PlotRange -> {{0, L}, {0, 2 P}}, PlotLabel -> "Shear V", AxesLabel -> {"X1 (m)", "V (N)"}, PlotLegends -> {"V exact", "V6"}]
Print["Seventh Order Polynomial"]
y7 = a2*X1^2 + a3*X1^3 + a4*X1^4 + a5*X1^5 + a6*X1^6 + a7*X1^7; d2y = D[y7, {X1, 2}];
PE = Integrate[Ee*Ii/2*d2y^2, {X1, 0, L}] - (-P)*y7 /. X1 -> L;
sol = Solve[{D[PE, a2] == 0, D[PE, a3] == 0, D[PE, a4] == 0, D[PE, a5] == 0, D[PE, a6] == 0, D[PE, a7] == 0}, {a2, a3, a4, a5,a6, a7}]
y7 = y7 /. sol[[1]]
M7 = FullSimplify[Ee*Ii*D[y7, {X1, 2}]]
V7 = FullSimplify[D[M7, X1]]
Plot[{y, y7}, {X1, 0, L}, PlotLabel -> "Displacement y", AxesLabel -> {"X1 (m)", "y (m)"}, PlotLegends -> {"y exact", "y7"}]
Plot[{M, M7}, {X1, 0, L}, PlotLabel -> "Moment M", AxesLabel -> {"X1 (m)", "M (N.m)"}, PlotLegends -> {"M exact", "M7"}]
Plot[{V, V7}, {X1, 0, L}, PlotRange -> {{0, L}, {0, 2 P}}, PlotLabel -> "Shear V", AxesLabel -> {"X1 (m)", "V (N)"}, PlotLegends -> {"V exact", "V7"}]
Plot[{y, y2, y3, y4, y5, y6, y7}, {X1, 0, L}, PlotLabel -> "Displacement y", AxesLabel -> {"X1 (m)", "y (m)"}, PlotLegends -> {"y exact", "y2", "y3", "y4", "y5", "y6", "y7"}]
Plot[{M, M2, M3, M4, M5, M6, M7}, {X1, 0, L}, PlotLabel -> "Moment M", AxesLabel -> {"X1 (m)", "M (N.m)"}, PlotLegends -> {"M exact", "M2", "M3", "M4", "M5", "M6", "M7"}]
Plot[{V,V2,V3,V4,V5,V6,V7}, {X1, 0, L}, PlotRange ->{{0, L}, {0, 2 P}},PlotLabel->"Shear V",AxesLabel -> {"X1 (m)", "V (N)"},PlotLegends -> {"V exact", "V2", "V3", "V4", "V5", "V6", "V7"}]
View Python Code
from sympy import *
from numpy import *
import sympy as sp
import numpy as np
import matplotlib.pyplot as plt
sp.init_printing(use_latex = "mathjax")
x, a2, a3, a4, a5, a6, a7, EI, L, E= symbols("x a_2 a_3 a_4 a_5 a_6 a_7 EI L E")
display("Exact")
b = 1/4
L = 8
t = (1/2-1/4*x/L)
I = b*t**3/12
E = 20*10**9
P = 10000
# Exact solution done in mathematica code
y = (34.8872 + (-2.96688 + 0.036864*x)*x + (-12.5829 + 0.786432*x)*sp.ln(16-x))/(x-16)
M = -80000 + 10000*x
V = M.diff(x)
display("y,M,V: ", y, M, V)
display("Second Order Polynomial")
y2 = a2*x**2
d2y = y2.diff(x,2)
PE2 = integrate(E*I/2*d2y**2, (x,0,L)) - (-P)*y2.subs(x,L)
display("Potential Energy: ", PE2)
sol = solve(PE2.diff(a2), a2)
y2 = y2.subs(a2,sol[0])
M2 = E*I*y2.diff(x,2)
V2 = M2.diff(x)
display("y2,M2,V2: ", y2, M2, V2)
display("Third Order Polynomial")
y3 = a2*x**2+a3*x**3
d2y = y3.diff(x,2)
PE3 = integrate(E*I/2*d2y**2, (x,0,L)) - (-P)*y3.subs(x,L)
display("Potential Energy: ", PE3)
sol = solve((PE3.diff(a2), PE3.diff(a3)), (a2,a3))
y3 = y3.subs({a2:sol[a2], a3:sol[a3]})
M3 = E*I*y3.diff(x,2)
V3 = M3.diff(x)
display("y3,M3,V3: ", y3, M3, V3)
display("Fourth Order Polynomial")
y4 = a2*x**2+a3*x**3+a4*x**4
d2y = y4.diff(x,2)
PE4 = integrate(E*I/2*d2y**2, (x,0,L)) - (-P)*y4.subs(x,L)
display("Potential Energy: ", PE4)
sol = solve((PE4.diff(a2), PE4.diff(a3), PE4.diff(a4)), (a2,a3,a4))
y4 = y4.subs({a2:sol[a2], a3:sol[a3], a4:sol[a4]})
M4 = E*I*y4.diff(x,2)
V4 = M4.diff(x)
display("y4,M4,V4: ", y4, M4, V4)
display("Fifth Order Polynomial")
y5 = a2*x**2+a3*x**3+a4*x**4+a5*x**5
d2y = y5.diff(x,2)
PE5 = integrate(E*I/2*d2y**2, (x,0,L)) - (-P)*y5.subs(x,L)
display("Potential Energy: ", PE5)
sol = solve((PE5.diff(a2), PE5.diff(a3), PE5.diff(a4), PE5.diff(a5)), (a2,a3,a4,a5))
y5 = y5.subs({a2:sol[a2], a3:sol[a3], a4:sol[a4], a5:sol[a5]})
M5 = E*I*y5.diff(x,2)
V5 = M5.diff(x)
display("y5,M5,V5: ", y5, M5, V5)
display("Sixth Order Polynomial")
y6 = a2*x**2+a3*x**3+a4*x**4+a5*x**5+a6*x**6
d2y = y6.diff(x,2)
PE6 = integrate(E*I/2*d2y**2, (x,0,L)) - (-P)*y6.subs(x,L)
display("Potential Energy: ", PE6)
sol = solve((PE6.diff(a2), PE6.diff(a3), PE6.diff(a4), PE6.diff(a5), PE6.diff(a6)), (a2,a3,a4,a5,a6))
y6 = y6.subs({a2:sol[a2], a3:sol[a3], a4:sol[a4], a5:sol[a5], a6:sol[a6]})
M6 = E*I*y6.diff(x,2)
V6 = M6.diff(x)
display("y6,M6,V6: ", y6, M6, V6)
display("Seventh Order Polynomial")
y7 = a2*x**2+a3*x**3+a4*x**4+a5*x**5+a6*x**6+a7*x**7
d2y = y7.diff(x,2)
PE7 = integrate(E*I/2*d2y**2, (x,0,L)) - (-P)*y7.subs(x,L)
display("Potential Energy: ", PE7)
sol = solve((PE7.diff(a2), PE7.diff(a3), PE7.diff(a4), PE7.diff(a5), PE7.diff(a6), PE7.diff(a7)), (a2,a3,a4,a5,a6,a7))
y7 = y7.subs({a2:sol[a2], a3:sol[a3], a4:sol[a4], a5:sol[a5], a6:sol[a6], a7:sol[a7]})
M7 = E*I*y7.diff(x,2)
V7 = M7.diff(x)
display("y7,M7,V7: ", y7, M7, V7)
#Graph
fig, ax = plt.subplots(3,1, figsize = (10,15))
plt.setp(ax[0], xlabel = "x(m) ", ylabel = "y(m)")
plt.setp(ax[1], xlabel = "x(m)", ylabel = "M(N*m)")
plt.setp(ax[2], xlabel = "x(m)", ylabel = "V(N)")
x1 = np.arange(0,8.1,0.1)
y_list = [y.subs({x:i}) for i in x1]
y2_list = [y2.subs({x:i}) for i in x1]
y3_list = [y3.subs({x:i}) for i in x1]
y4_list = [y4.subs({x:i}) for i in x1]
y5_list = [y5.subs({x:i}) for i in x1]
y6_list = [y6.subs({x:i}) for i in x1]
y7_list = [y7.subs({x:i}) for i in x1]
M_list = [M.subs({x:i}) for i in x1]
M2_list = [M2.subs({x:i}) for i in x1]
M3_list = [M3.subs({x:i}) for i in x1]
M4_list = [M4.subs({x:i}) for i in x1]
M5_list = [M5.subs({x:i}) for i in x1]
M6_list = [M6.subs({x:i}) for i in x1]
M7_list = [M7.subs({x:i}) for i in x1]
V_list = [V.subs({x:i}) for i in x1]
V2_list = [V2.subs({x:i}) for i in x1]
V3_list = [V3.subs({x:i}) for i in x1]
V4_list = [V4.subs({x:i}) for i in x1]
V5_list = [V5.subs({x:i}) for i in x1]
V6_list = [V6.subs({x:i}) for i in x1]
V7_list = [V7.subs({x:i}) for i in x1]
ax[0].plot(x1, y_list, 'blue', label = "Exact y")
ax[0].plot(x1, y2_list, 'orange', label = "y2")
ax[0].plot(x1, y3_list, 'green', label = "y3")
ax[0].plot(x1, y4_list, 'red', label = "y4")
ax[0].plot(x1, y5_list, 'purple', label = "y5")
ax[0].plot(x1, y6_list, 'brown', label = "y6")
ax[0].plot(x1, y7_list, 'cyan', label = "y7")
ax[0].legend()
ax[1].plot(x1, M_list, 'blue', label = "Exact M")
ax[1].plot(x1, M2_list, 'orange', label = "y2")
ax[1].plot(x1, M3_list, 'green', label = "y3")
ax[1].plot(x1, M4_list, 'red', label = "y4")
ax[1].plot(x1, M5_list, 'purple', label = "y5")
ax[1].plot(x1, M6_list, 'brown', label = "y6")
ax[1].plot(x1, M7_list, 'cyan', label = "y7")
ax[1].legend()
ax[2].plot(x1, V_list, 'blue', label = "Exact V")
ax[2].plot(x1, V2_list, 'orange', label = "y2")
ax[2].plot(x1, V3_list, 'green', label = "y3")
ax[2].plot(x1, V4_list, 'red', label = "y4")
ax[2].plot(x1, V5_list, 'purple', label = "y5")
ax[2].plot(x1, V6_list, 'brown', label = "y6")
ax[2].plot(x1, V7_list, 'cyan', label = "y7")
ax[2].legend()