Vibrations of Continuous Systems: Axial Vibrations of a Uniform Bar
Equation of Motion
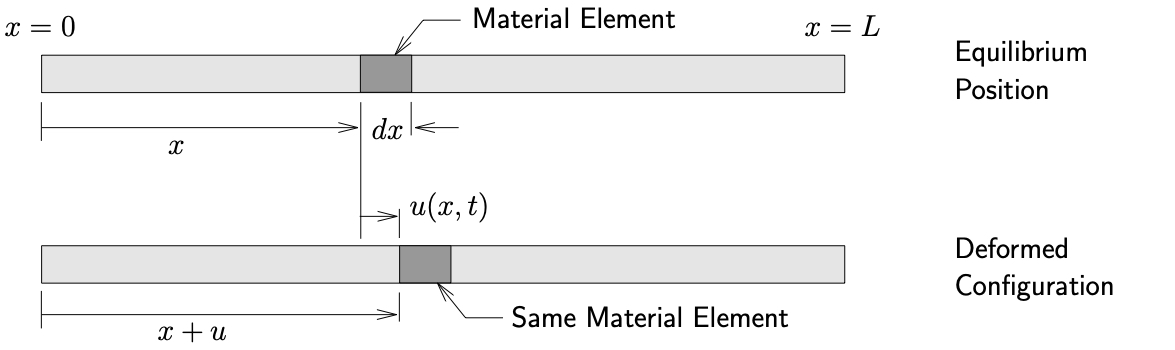

Figure 10.4: Axial vibrations of a uniform bar
Consider a uniform bar shown in Figure 10.4(a) which has a length  , cross–sectional area
, cross–sectional area  and density
and density  (mass per unit volume). Let
(mass per unit volume). Let  measure the axial deformation of the material located at position
measure the axial deformation of the material located at position  in the equilibrium position. A FBD/MAD of an infinitesimal element of the beam is shown in Figure 10.4(b). Applying Newton’s Laws we get
in the equilibrium position. A FBD/MAD of an infinitesimal element of the beam is shown in Figure 10.4(b). Applying Newton’s Laws we get
![\[\stackrel{+}\rightarrow\sum F = ma:\qquad\sigma\bigl(x + dx\bigr) \cancel{A} - \sigma\bigl(x\bigr) \cancel{A} = \rho \cancel{A} dx \ensuremath{\frac{\partial^2 u}{\partial t^2}}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-0e546728e6aefe57e137fb0670b718e1_l3.png "Rendered by QuickLaTeX.com")
For a linear elastic material

where  is Young’s modulus and
is Young’s modulus and  is the axial strain given by
is the axial strain given by

For small deformations we can make the approximation that

and

The equation of motion then becomes
![\begin{align*}E\Bigl({\frac{\partial u}{\partial x}} + \ensuremath{\frac{\partial^2 u}{\partial x^2}} dx \Bigr)- {E\Bigl(\frac{\partial u}{\partial x}\Bigr)} &= \rho dx \ensuremath{\frac{\partial^2 u}{\partial t^2}} \\[2mm]E \ensuremath{\frac{\partial^2 u}{\partial x^2}} {dx} &= \rho {dx} \, \ensuremath{\frac{\partial^2 u}{\partial t^2}}\end{align*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-8d706c725582c24a45d2195715cffae5_l3.png "Rendered by QuickLaTeX.com")
or finally
(10.19) 
where
(10.20) 
We recognize 10.19 once again as the wave equation. In this case  is the speed of the axial waves traveling along the beam as opposed to the transverse motions for the cable seen previously.
is the speed of the axial waves traveling along the beam as opposed to the transverse motions for the cable seen previously.
Solution for the Axial Response of the Beam
Following our previous solution procedure for cables, we assume a solution of the form

Upon substitution into the equation of motion and proceeding as before we find that
(10.21a) 
(10.21b) 
As a result the total solution for the axial motions becomes
(10.22) ![\begin{equation*}u(x,t) = \underbrace{\biggl[ \hat{A} \sin\biggl(\frac{p x}{\ensuremath{c}}\biggr) + \hat{B} \cos\biggl(\frac{p x}{\ensuremath{c}}\biggr) \biggr]}_{\text{Mode shape (function of $x$)}}\underbrace{\biggl[ \hat{C} \sin(p t) + \hat{D} \cos(p t) \biggr]}_{\text{Harmonic motion (function of $t$)}}\end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-58cc325a71a8b32f7b99d3ce8df3466d_l3.png "Rendered by QuickLaTeX.com")
Once again the constants  and
and  are determined from the boundary conditions while
are determined from the boundary conditions while  and
and  are subsequently determined from the initial conditions.
are subsequently determined from the initial conditions.
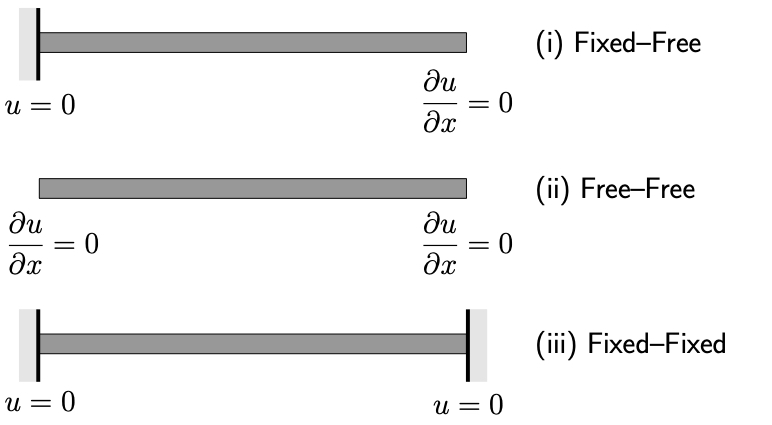
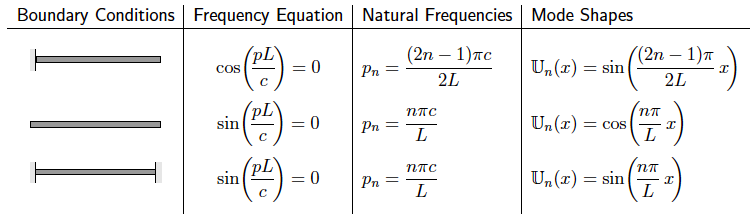
Some common boundary conditions for axial motions of beams are illustrated in Figure 10.5. The results for some common beam configurations are shown in Table 10.2. The procedure to find these results is the same as was followed for the vibrating cable considered earlier.