
Approximate Methods for Continuous Systems: Application to Lateral Vibrations of Beams
The systems we have considered so far have been relatively simple so we were able to find analytical solutions. This is usually possible in only the simplest situations. For more complicated systems, say ones which include
- non-uniform material properties and/or cross sections, or
- more complicated boundary conditions,
it is very difficult, if not impossible, to determine analytical solutions. In these situations we usually resort to numerical solutions. Sometimes however, other approximate techniques can also be useful. In particular, Rayleigh’s Method is well suited for use with continuous systems.
Recall that for discrete systems, Rayleigh’s Quotient was expressed as
(11.1) ![\begin{equation*} p^2 = \frac { \{\Phi\}^T \text{[}k\text{]} \{\Phi\}} { \{\Phi\}^T \text{[}m\text{]} \{\Phi\} } \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-da9bb62fa445749d536c9cf984900536_l3.png "Rendered by QuickLaTeX.com")
where ![\text{[}k\text{]}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-389a64134f13f074cea0fa03c502852d_l3.png "Rendered by QuickLaTeX.com") is the stiffness matrix,
is the stiffness matrix, ![\text{[}m\text{]}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1c20a50b1fc57786359bd0b19c5acf28_l3.png "Rendered by QuickLaTeX.com") is the mass matrix and {
is the mass matrix and { } is a mode shape vector. To determine an approximate natural frequency, a trial mode shape vector {} is used in 11.1 to return an upper limit on the lowest natural frequency.
} is a mode shape vector. To determine an approximate natural frequency, a trial mode shape vector {} is used in 11.1 to return an upper limit on the lowest natural frequency.
To apply Rayleigh’s Quotient to continuous systems, we recall that Rayleigh’s Quotient is based on the idea that the maximum kinetic energy and the maximum potential energy in a conservative system will be equal. This requires that the potential energy be zero in the equilibrium configuration.

when all of the masses in the system undergo simple simultaneous harmonic motion, as happens in the modal responses.
We can also apply this idea to continuous systems. If  is some representative displacement function, the procedure will be to
is some representative displacement function, the procedure will be to
- Estimate the fundamental mode shape
 .
. - Assume simple simultaneous harmonic motion of the form

- Determine the maximum potential energy
 .
. - Determine the maximum kinetic energy

- Set
 and solve for
and solve for 
It is important here that the mode shape assumed in step (a) satisfies the (geometric) boundary conditions of the problem. If this is the case then the frequency determined by this procedure will again be an upper bound on the lowest natural frequency. If the assumed mode shape doesn’t satisfy the (geometric) boundary conditions in the problem, then we no longer have this guarantee.
To apply Rayleigh’s Method to beams, we need to be able to determine the potential and kinetic energies associated with a beam vibrating in a given assumed mode shape.
Potential Energy
Potential energy is stored in a beam as elastic (strain) energy. In most cases the energy stored due to bending is much larger than that stored due to shear or axial forces. As a result only the energy associated with bending is usually considered.
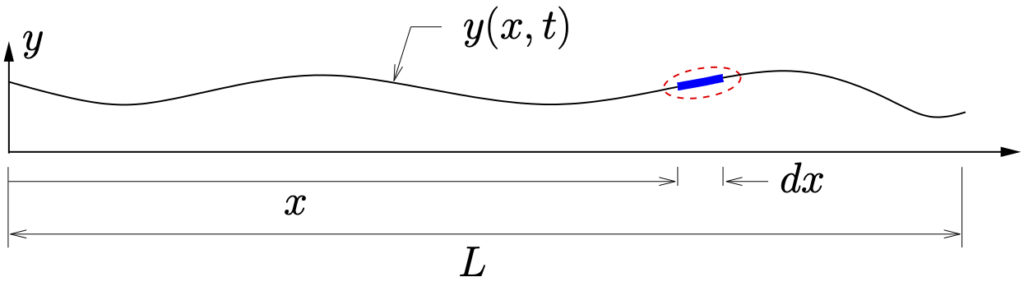
(a) Deformed Body
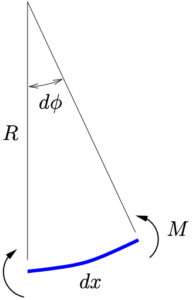
(b) Infinitesimal Element
Figure 11.1: Initially straight beam in arbitrary deformed configuration
Consider an initially straight beam, deformed to some arbitrary configuration  (limited to small motions) during its motion as shown in Figure 11.1{a}. Figure 11.1{b} shows an infinitesimal element of the beam during this motion. At this point the beam element has a radius of curvature~
(limited to small motions) during its motion as shown in Figure 11.1{a}. Figure 11.1{b} shows an infinitesimal element of the beam during this motion. At this point the beam element has a radius of curvature~ which is related to the included angle
which is related to the included angle  by
by
(11.2) 
For an elastic beam the bending moment is related to the deflection (curvature) by
(11.3) 
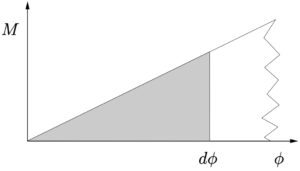
Now, consider the infinitesimal work done on the beam element as it is deformed from its initially unloaded straight (equilibrium) configuration to one with an included angle as shown in Figure 11.1{b}. The work is

which is equal to the area under the  –
– graph as shown. For an elastic beam, this work done on the beam is equal to the strain energy
graph as shown. For an elastic beam, this work done on the beam is equal to the strain energy  stored in the beam element, so that we get
stored in the beam element, so that we get

Using equation 11.2 and equation 11.3 this becomes
![\begin{equation*} dU &= \frac{1}{2} \biggl[ EI\frac{1}{R} \biggr] \biggl[ \frac{dx}{R} \biggr] \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-afe3b0edcf626122d8cede07d0e76fed_l3.png "Rendered by QuickLaTeX.com")
or
(11.4) ![\begin{align*} dU &= \frac{1}{2} EI \biggl( \frac{1}{R} \biggr)\!\!\rule[7mm]{0pt}{0pt}^2 dx. \end{align*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e6cb583bcbb9341a5a01340a2d9a86a3_l3.png "Rendered by QuickLaTeX.com")
For small deflections,

so 11.4 becomes
(11.5) ![\begin{equation*} dU = \frac{1}{2} EI \biggl( \frac{\partial^2 y}{\partial x^2} \biggr)\!\!\rule[7mm]{0pt}{0pt}^2 dx, \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c0d369bf49a56a6d1b0a03cee74d9ef2_l3.png "Rendered by QuickLaTeX.com")
which gives the strain energy stored in the infintesimal beam element. To find the total strain energy stored, we integrate over the length of the beam
(11.6) ![\begin{align*} U &= \int\limits_{\text{beam}} dU \nonumber \\ &= \frac{1}{2} \int_0^L EI \biggl( \frac{\partial^2 y}{\partial x^2} \biggr)\!\!\rule[7mm]{0pt}{0pt}^2 dx. \end{align*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-0e425821c4e38fc7a0d9243bf94df2ad_l3.png "Rendered by QuickLaTeX.com")
If we make the usual assumption that the motion of the beam is of the form

then

so equation 11.6 becomes
(11.7) ![\begin{equation*} U = \frac{1}{2} \int_0^L EI \biggl[ \frac{d^2 Y}{dx^2} \sin{(pt +\phi)} \biggr]^2 dx. \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e8bdac4bd5bf9e5fb768827b5e365160_l3.png "Rendered by QuickLaTeX.com")
The maximum strain energy occurs when

which occurs at the same instant for every point on the beam. Using 11.7 we find that
(11.8) ![\begin{equation*} \boxed{U_{MAX }= \frac{1}{2} \int_0^L EI \biggl[ \frac{d^2 Y}{dx^2} \biggr]^2 dx.} \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-266c5e9419e91080c27e8df5288aba56_l3.png "Rendered by QuickLaTeX.com")
Equation 11.8 represents the maximum strain energy stored in the beam for a given (assumed) mode shape  . Note that since
. Note that since

Equation 11.8 can equivalently be written as
(11.9) ![\begin{equation*} \boxed{U_{MAX} = \frac{1}{2} \int_0^L \biggl[ \frac{M^2(x)}{EI} \biggr] dx,} \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-277e3a06b1d21620a9837b003fbe3abc_l3.png "Rendered by QuickLaTeX.com")
which may be easier to use in some cases.
Kinetic Energy
Once again consider the infinitesimal beam element shown in Figure 11.1(b). The kinetic energy of that element is given by

where

is the mass of the infinitesimal element and its speed is given by (This considers only the translational kinetic energy and ignores any rotational energy, i.e. Euler beam theory.)

Assuming once again that the motion of the beam is of the form

(11.10) 
Therefore the kinetic energy becomes
![\begin{equation*} dT = \frac{1}{2} \rho A \biggl[ \mathbb{Y}(x) p \cos{(pt + \phi)} \biggr]^2 dx. \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f9d501a290ef478da830b161582761bd_l3.png "Rendered by QuickLaTeX.com")
The total kinetic energy in the beam is then obtained by integration
![\begin{align*} T &= \int\limits_{\text{beam}} dT \\ &= \frac{1}{2} \, p^2 \int_0^L \! \rho A \biggl[ \mathbb{Y}(x) \cos{(pt + \phi)} \biggr]^2 dx. \end{align*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-48007d649b8e558fb68815ec8adb292d_l3.png "Rendered by QuickLaTeX.com")
This is a maximum when

which occurs simultaneously at all points on the beam. Therefore the maximum kinetic energy in the vibrating beam is
(11.11) ![\begin{equation*} \boxed{T_{MAX} = \frac{1}{2} \, p^2 \int_0^L \! \rho A \Bigl[ \mathbb{Y}(x) \Bigr]^2 dx.} \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6236f914e4dd80f5012a5d946227d60c_l3.png "Rendered by QuickLaTeX.com")
Rayleigh’s Quotient For Lateral Vibrations of Beams
As we have seen previously, for a conservative system,

Using equation 11.8 and equation 11.11 this becomes
![\begin{equation*} {\frac{1}{2}} \, p^2 \int_0^L \rho A \Bigl[ \mathbb{Y}(x) \Bigr]^2 dx = {\frac{1}{2}} \int_0^L EI \biggl[ \frac{d^2 \mathbb{Y}}{dx^2} \biggr]^2 dx \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-00d3f22d487cdca0aa410145af9dd4dc_l3.png "Rendered by QuickLaTeX.com")
(11.12) ![\begin{equation*} \boxed{p^2 = \dfrac{\int\limits_0^L EI \biggl[ \dfrac{d^2 \mathbb{Y}}{dx^2} \biggr]^2 dx} {\int\limits_0^L \rho A \Bigl[ \mathbb{Y}(x) \Bigr]^2 dx}.} \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-78f8ffb4321c8979682d586497bcd860_l3.png "Rendered by QuickLaTeX.com")
Equation 11.12 is Rayleigh’s Quotient for beam applications where, as in the multiple degree of freedom cases discussed previously, is an assumed mode shape for the beam. If the assumed mode shape satisfies the geometric boundary conditions in the system, the natural frequency obtained using equation 11.12 will be an upper bound on the lowest (fundamental) natural frequency.
Example
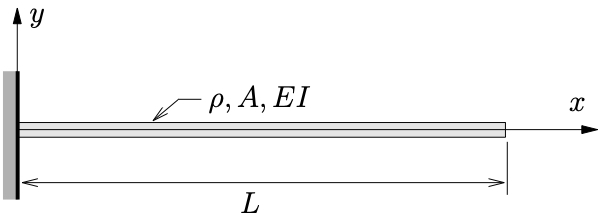
- Estimate the fundamental natural frequency of a uniform cantilever beam of length
 (
( are all constants). Assume a mode shape of
are all constants). Assume a mode shape of

- Repeat the calculation in part (1) but instead use an assumed shape function

which is the static equilibrium shape of the beam when it is subjected to a unit tip load. Compare these predictions to the true fundamental natural frequency

Extensions to Rayleigh’s Method for Beams
For beams, Rayleigh’s Quotient, given by 11.12 was obtained by considering the ratio of the maximum potential and kinetic energies in the system. We can extend this idea to consider additional springs and masses in the system.
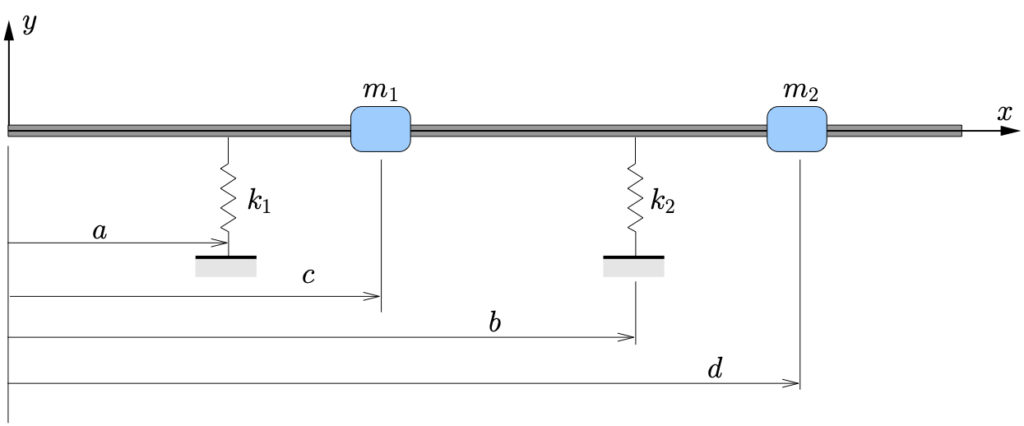
Figure 11.2: Beam with additional masses and supports
Consider the system shown in Figure 11.2. To determine the potential energy stored in the system for an assumed mode shape , we can include the potential energy stored in the springs as additional terms
![\begin{equation*} \frac{1}{2} k_1 \Bigl[ \mathbb{Y}(a) \Bigr]^2 + \frac{1}{2} k_2 \Bigl[ \mathbb{Y}(b) \Bigr]^2 \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-eea9ada293b15945d15c60293be9d7fe_l3.png "Rendered by QuickLaTeX.com")
where  and
and  are the deflections of the beam at locations
are the deflections of the beam at locations  and
and  respectively. The maximum potential energy stored in the systems then becomes
respectively. The maximum potential energy stored in the systems then becomes
(11.13) ![\begin{equation*} \boxed{U_{MAX} = \frac{1}{2} \int_0^L EI \biggl[ \dfrac{d^2 \mathbb{Y}}{dx^2} \biggr]^2 dx + \frac{1}{2} k_1 \Bigl[ \mathbb{Y}(a)\Bigr]^2 + \frac{1}{2} k_2 \Bigl[ \mathbb{Y}(b)\Bigr]^2.} \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ba1d133f6e423b7c40eb9806c932262f_l3.png "Rendered by QuickLaTeX.com")
Similarly, the extra kinetic energy in the beam due to the additional masses is given by

where

However, we have seen in equation 11.10 that

so that the speeds become

These will be maximum when  so that the maximum additional kinetic energy is
so that the maximum additional kinetic energy is
![\begin{equation*} \frac{1}{2} m_1 p^2 \Bigl[\mathbb{Y}(c)\Bigr]^2 + \frac{1}{2} m_2 p^2 \Bigl[\mathbb{Y}(d)\Bigr]^2. \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-0f24bf1a6436d54737e83cfd27851155_l3.png "Rendered by QuickLaTeX.com")
As a result the total maximum kinetic energy in the system is given by
(11.14) ![\begin{equation*} \boxed{T_{MAX} = \frac{1}{2} \, p^2 \int_0^L \rho A \Bigl[ \mathbb{Y}(x) \Bigr]^2 dx + \frac{1}{2} m_1 p^2 \Bigl[\mathbb{Y}(c)\Bigr]^2 + \frac{1}{2} m_2 p^2 \Bigl[\mathbb{Y}(d)\Bigr]^2.} \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c0c7048fdb9f822835160e157cbd7a85_l3.png "Rendered by QuickLaTeX.com")
Equating 11.13 and equation 11.14 we see that
![\begin{equation*} \begin{split} {\frac{1}{2}} p^2 \int_0^L \rho A \Bigl[ \mathbb{Y}(x) \Bigr]^2 dx + {\frac{1}{2}} m_1 p^2 \Bigl[\mathbb{Y}(c)\Bigr]^2 + {\frac{1}{2}} m_2 p^2 \Bigl[\mathbb{Y}(d)\Bigr]^2 = \\ {\frac{1}{2}} \int_0^L EI \biggl[ \dfrac{d^2 \mathbb{Y}}{dx^2} \biggr]^2 dx + {\frac{1}{2}} k_1 \Bigl[ \mathbb{Y}(a)\Bigr]^2 +{\frac{1}{2}} k_2 \Bigl[ \mathbb{Y}(b)\Bigr]^2 \end{split} \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-948bb4ebdb4bfbc7dd1ba664658f629a_l3.png "Rendered by QuickLaTeX.com")
or
![\begin{equation*} p^2 = \dfrac{\int\limits_0^L EI \biggl[ \dfrac{d^2 \mathbb{Y}}{dx^2} \biggr]^2 dx + k_1 \Bigl[ \mathbb{Y}(a)\Bigr]^2 + k_2 \Bigl[ \mathbb{Y}(b)\Bigr]^2} {\int\limits_0^L \rho A \Bigl[ \mathbb{Y}(x) \Bigr]^2 dx + m_1 \Bigl[\mathbb{Y}(c)\Bigr]^2 + m_2 \Bigl[\mathbb{Y}(d)\Bigr]^2}. \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e1c919dcbb612edfc3ece1d67b188d58_l3.png "Rendered by QuickLaTeX.com")
This can be generalized to a beam with  masses and
masses and  springs as
springs as
(11.15) ![\begin{equation*} \boxed{p^2 = \dfrac{\int\limits_0^L EI \biggl[ \dfrac{d^2 \mathbb{Y}}{dx^2} \biggr]^2 dx + \sum\limits_{i=1}^{s} k_i \Bigl[ \mathbb{Y}(x_i)\Bigr]^2} {\int\limits_0^L \rho A \Bigl[ \mathbb{Y}(x) \Bigr]^2 dx + \sum\limits_{j=1}^{r} m_j \Bigl[ \mathbb{Y}(x_j)\Bigr]^2}.} \end{equation*}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9831c8e00170a8861d1a1bf2eb49dd5c_l3.png "Rendered by QuickLaTeX.com")
Example 1
A driveshaft for a marine propeller can be modeled as shown below.
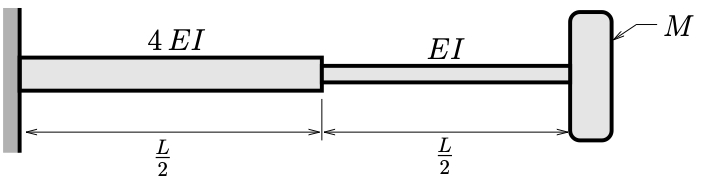
- Estimate the fundamental natural frequency using Rayleigh’s quotient. Assume a mode shape of

and neglect the mass of the shaft.
- An alternative design for this propeller features a uniform shaft stiffened with an intermediate bearing (with stiffness
 ) as shown below.
) as shown below.
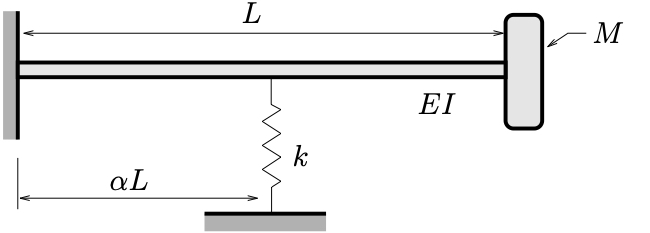 Estimate the location
Estimate the location  for this bearing such that the natural frequency of the alternate design is the same as for the original design. Express your answer in terms of
for this bearing such that the natural frequency of the alternate design is the same as for the original design. Express your answer in terms of  and .
and .
Use the same assumed mode shape  and once again neglect the mass of the shaft in your calculations.
and once again neglect the mass of the shaft in your calculations.
Example 2
Two views of an airplane wing are shown in which the wing is modeled as a cantilever that has a varying stiffness  and a wing tank of mass when filled with aviation gasoline.
and a wing tank of mass when filled with aviation gasoline.
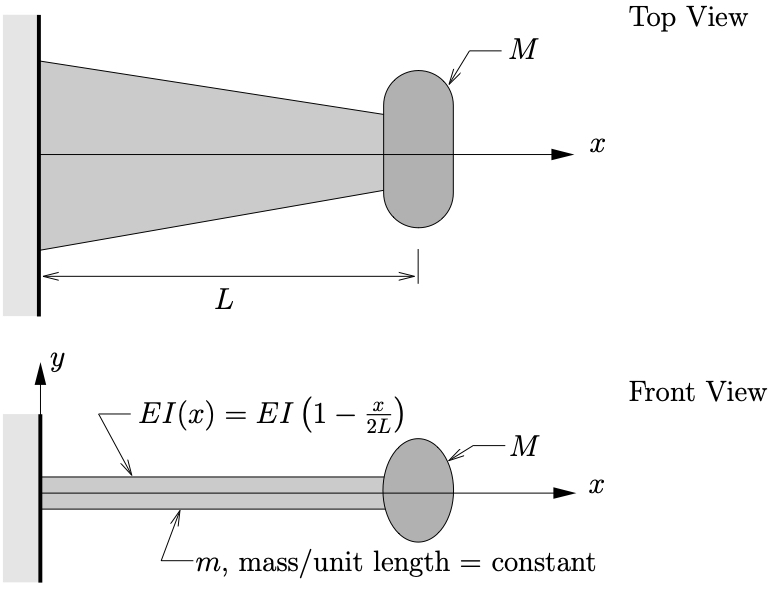
- Determine an expression for the lowest natural frequency of free vertical vibrations of the wing and fuel tank. Assume a trial function

- If the natural frequency is not to be more than 25% greater when the tank is empty (
 ) than when it is full (mass is included), determine the maximum mass which can be added in comparison to the mass of the wing itself.
) than when it is full (mass is included), determine the maximum mass which can be added in comparison to the mass of the wing itself.