
Vectors and their Operations: Cartesian vector notation
Cartesian coordinate systems
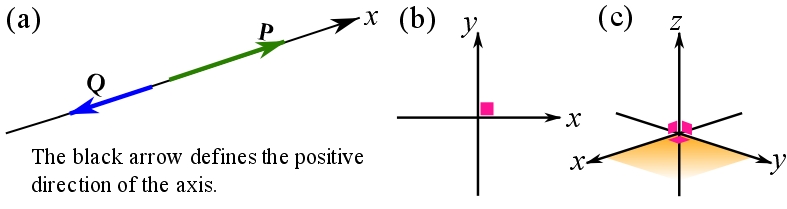
A convenient set of directions is a set of perpendicular directions called orthogonal axes. Orthogonal means perpendicular. The positive direction of an axis sets a benchmark to determine the positive (or negative) direction of a vector along (parallel with) the axis. For example, considering an axis x shown in Fig. 2.14a,  is in the positive direction and
is in the positive direction and  is in the negative direction with respect to axis x.
is in the negative direction with respect to axis x.
Decomposing a vector in the two-dimensional plane needs two orthogonal axes (Fig. 2.14b). Decomposing a spatial vector (a vector in the three-dimensional space) needs three orthogonal axes (Fig. 2.14c). A set of orthogonal axes, intersecting at a point (the origin), is called a Cartesian coordinate system or Cartesian frame.
Unit vector
A Unit vector. A unit vector is a vector of magnitude  . Any vector can be written as a scalar multiplication of a unit vector with the same direction as the original vector:
. Any vector can be written as a scalar multiplication of a unit vector with the same direction as the original vector:  such that the notation
such that the notation  indicates the unit vector (
indicates the unit vector ( ) in the direction of
) in the direction of  . Any vector
. Any vector  can become a unit vector if scaled by
can become a unit vector if scaled by  meaning that
meaning that  . The vector is called the unit vector of . Making a unit vector out of a vector is called normalizing a vector. The unit vector of a vector has the same direction as the original vector.
. The vector is called the unit vector of . Making a unit vector out of a vector is called normalizing a vector. The unit vector of a vector has the same direction as the original vector.
Experiment with the following interactive tool to investigate how a vector is a scalar multiplicand of its unit vector.
Cartesian vector notation
The components of a vector along orthogonal axes are called rectangular components or Cartesian components. A vector decomposed (resolved) into its rectangular components can be expressed by using two possible notations namely the scalar notation (scalar components) and the Cartesian vector notation. Both notations are explained for the two-dimensional (planar) conditions, and then extended to three dimensions in the following sections.
Rectangular vector components of coplanar vectors
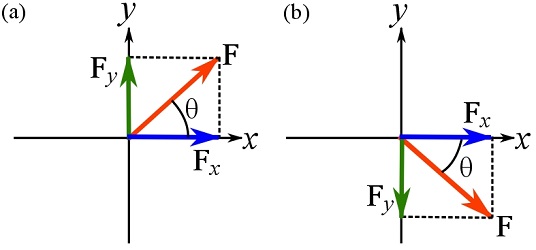
Consider a vector  and its rectangular components resolved in a Cartesian system as shown in Fig. 2.15. The
and its rectangular components resolved in a Cartesian system as shown in Fig. 2.15. The  and
and  vector components of are resolved and denoted by
vector components of are resolved and denoted by  and
and  respectively. The subscripts and denote the axes with which the components are parallel. The magnitude of the vector components are
respectively. The subscripts and denote the axes with which the components are parallel. The magnitude of the vector components are  and
and  . By definition, the magnitudes of a vector is a positive number. Therefore, the magnitude of a vector component does not hold any information about the sense of direction. To include the information about the directions of the vector components in a Cartesian system, scalar notation or scalar components are defined. Scalar components of a vector are signed magnitudes of its rectangular components. A scalar component is positive if the vector component is directed along the positive axis, and negative if the vector component is directed along the negative axis (opposite of the axis positive direction). For the vector components and shown in Fig. 2.15, the scalar components are denoted by
. By definition, the magnitudes of a vector is a positive number. Therefore, the magnitude of a vector component does not hold any information about the sense of direction. To include the information about the directions of the vector components in a Cartesian system, scalar notation or scalar components are defined. Scalar components of a vector are signed magnitudes of its rectangular components. A scalar component is positive if the vector component is directed along the positive axis, and negative if the vector component is directed along the negative axis (opposite of the axis positive direction). For the vector components and shown in Fig. 2.15, the scalar components are denoted by  and
and  . Note the regular and italic font face used for the notation. The scalar components of the vector shown in Fig. 2.15a are
. Note the regular and italic font face used for the notation. The scalar components of the vector shown in Fig. 2.15a are  and
and  both being positive. The scalar components of the vector shown in Fig. 2.15b, however, are and
both being positive. The scalar components of the vector shown in Fig. 2.15b, however, are and  . The scalar component is negative, because its vector component is directed along the negative direction of the y axis.
. The scalar component is negative, because its vector component is directed along the negative direction of the y axis.
 resolved in the Cartesian system.
resolved in the Cartesian system.An axis has an associated unit vector showing the positive direction of the axis. Any vector parallel with an axis can be written as a scalar multiplier of the axis’ unit vector. The scalar multiplier is equal to the scalar component (signed magnitude) of the vector parallel with the axis. The scalar multiplier is positive if the vector is in the direction of the axis unit vector, and negative otherwise.
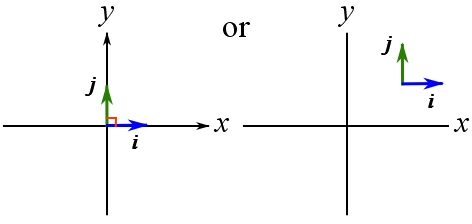
The unit vectors associated with Cartesian x and y axes are denoted by bold lower-case letters  and
and  respectively and their respective small arrows are displayed on the Cartesian axes (Fig. 2.16). Another possible notations are
respectively and their respective small arrows are displayed on the Cartesian axes (Fig. 2.16). Another possible notations are  and
and  .
.
The rectangular components of any vector can be now expressed in terms of the Cartesian axis unit vectors,
(2.1a) ![\[\bold F =\bold F_x + \bold F_y = F_x\bold i + F_y\bold j\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-2ef991c0a81c8fa247930547f914e17d_l3.png "Rendered by QuickLaTeX.com")
where and are the scalar components.
As a general rule any vector can be written as,
(2.1b) ![\[\bold F = \pm\vert \bold F_x\vert \bold i \pm\vert \bold F_y\vert \bold j=F_x\bold i + F_y\bold j \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5959861a8566761d834b939a45649f71_l3.png "Rendered by QuickLaTeX.com")
Remark: using CVN is equivalent to resolving a vector in a Cartesian coordinate system.
Remark: in CVN, capital letters (non-bold), such as, and , represent scalar components. Their values can be negative or positive, depending on the directions of the components relative to , , and  . In the formulations of later chapter, where CVN is not used, capital letters represent the magnitudes of vector or vector components, for simplicity.
. In the formulations of later chapter, where CVN is not used, capital letters represent the magnitudes of vector or vector components, for simplicity.
Remark: components of a vector are vectors, whereas the scalar components (vector coordinates) are scalar (i.e. signed magnitudes).
Using the following interactive tool, you can observe the (vector) components and scalar components of a vector. Observe how the vector is represented in CVN. Change the direction of the vector by the angle slider and observe the values of the scalar components. When do the scalar components attain negative values?
EXAMPLE 2.4.1
Determine the scalar components of shown in the figure below and write the the vector in CVN.
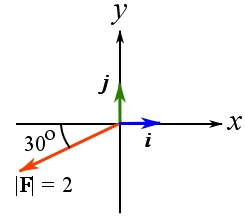
SOLUTION
![\[\begin{split}|\bold F_x|&=2\cos{30^{\circ}}=1.73\\|\bold F_y|&=2\sin{30^{\circ}}=1.00\\\therefore F_x&=-1.73, \quad F_y=-1.00\implies \bold F =-1.73\bold i-1.00\bold j\end{split}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-dc79feeab7faafd8bb8f57443f212374_l3.png "Rendered by QuickLaTeX.com")
Remark: the location of a vector with respect to the origin of the Cartesian coordinate system does not affect its Cartesian components. You can always consider (draw) parallel axes with the Cartesian axes at the tail of a vector and calculate its components.
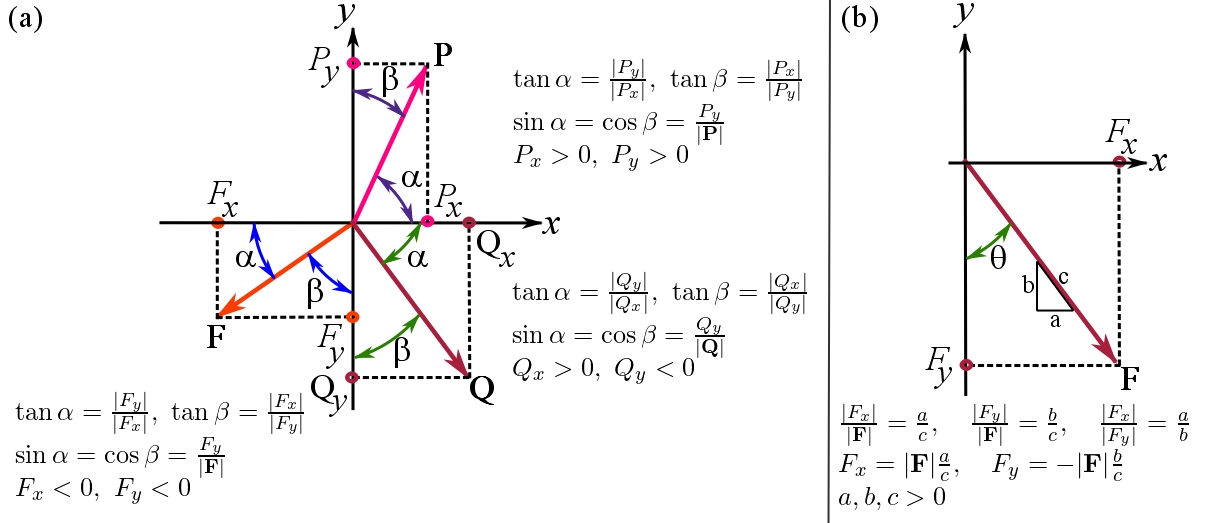
To determine the components of a planar vector in the Cartesian frame, or to calculate its orientation with respect to any axis, we consider the acute angle that the vector makes with one of the Cartesian axes. This allows us to establish the relationships between the vector’s magnitude and its components. A minus sign is manually assigned to components that act in the directions opposite to the coordinate axes.
If  and
and  are angles of a vector with x and y axes respectively, the following equations hold,
are angles of a vector with x and y axes respectively, the following equations hold,
(2.2) ![\[\begin{split}|\bold F|^2 =F_x^2 + F_y^2 \quad &\text{or}\quad \vert \bold F\vert =\sqrt {F_x^2 + F_y^2}\\\text{ for }\quad 0^\circ\le &\alpha,\beta < 90^\circ\\\tan \alpha = \frac{| F_y|}{| F_x|}&,\quad \tan \beta = \frac{|F_x|}{|F_y|}\\\sin\alpha=\cos \beta=\frac{|F_y|}{|\bold F|}&,\quad\sin\beta=\cos \alpha=\frac{|F_x|}{|\bold F|} \end{split}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5426e5b31ae47024e4b2f45305f80430_l3.png "Rendered by QuickLaTeX.com")
Note that the absolute values of the scalar components, which are the magnitudes of the vector Cartesian components, are used in the trigonometry functions. Fig. 2.17a demonstrates three cases of vector decomposition based on the defined angles  and
and  . Pay attention to the signs of the scalar components based on the Cartesian components of the vectors.
. Pay attention to the signs of the scalar components based on the Cartesian components of the vectors.
Another possible way of specifying the direction of a planar vector is by a small slope triangle. The small slope triangle conveys the information on  ,
,  , and
, and  of the angle that the vector makes with an axis (Fig. 2.17b).
of the angle that the vector makes with an axis (Fig. 2.17b).
Remark: be cautious about the way the direction of a vector is specified and the proper formulation you should use for the calculations.
Remark: using the angles  (which a vector makes with the Cartesian axes) to specify the direction of the vector has a calculation advantage that
(which a vector makes with the Cartesian axes) to specify the direction of the vector has a calculation advantage that  is in the domain of the inverse trigonometric functions
is in the domain of the inverse trigonometric functions  ,
,  and
and  .
.
Rectangular vector components of spatial vectors
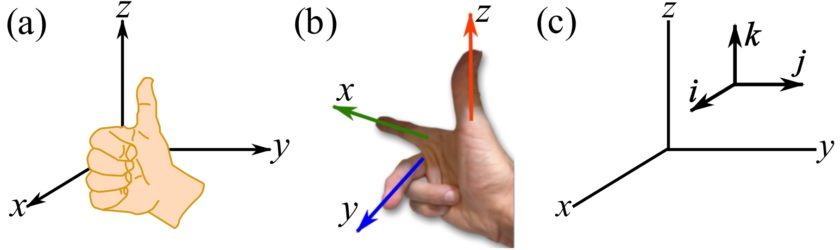
To treat a vector in three dimensions, a three-dimensional Cartesian coordinate system is to be defined. A common three-dimensional Cartesian coordinate system is a right-handed coordinate system. A coordinate system of three orthogonal axes is said to be right-handed if your right-hand thumb points in the positive  direction when fingers curl from the (positive) x axis to the (positive) y axis (Fig. 2.18a). Another way to define a right-handed Cartesian coordinate system is to follow the right-hand three-finger rule as demonstrated Fig. 2.18b. In three dimensions, the unit vectors of the axes are denoted by , , and as demonstrated in Fig. 2.18c.
direction when fingers curl from the (positive) x axis to the (positive) y axis (Fig. 2.18a). Another way to define a right-handed Cartesian coordinate system is to follow the right-hand three-finger rule as demonstrated Fig. 2.18b. In three dimensions, the unit vectors of the axes are denoted by , , and as demonstrated in Fig. 2.18c.
Right-click and rotate the following three-dimensional right-handed Cartesian coordinate system to observe its different orientations.
Any vector in three dimensions can be resolved into three rectangular components. A vector expressed in CVN (three dimensions) is written as,
(2.3) ![\[\bold A = \bold A_x + \bold A_y + \bold A_z = A_x\bold i + A_y\bold j + A_z\bold k\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6d5c6e699c922bf4352853124506f185_l3.png "Rendered by QuickLaTeX.com")
where  ,
,  and
and  are the vector (rectangular or Cartesian) components, and
are the vector (rectangular or Cartesian) components, and  ,
,  and
and  are the scalar components (Fig. 2.19a). The magnitude of is
are the scalar components (Fig. 2.19a). The magnitude of is  . This can be proved by considering the shaded triangles in Fig. 2.19b and twice using the Pythagoras’ theorem.
. This can be proved by considering the shaded triangles in Fig. 2.19b and twice using the Pythagoras’ theorem.
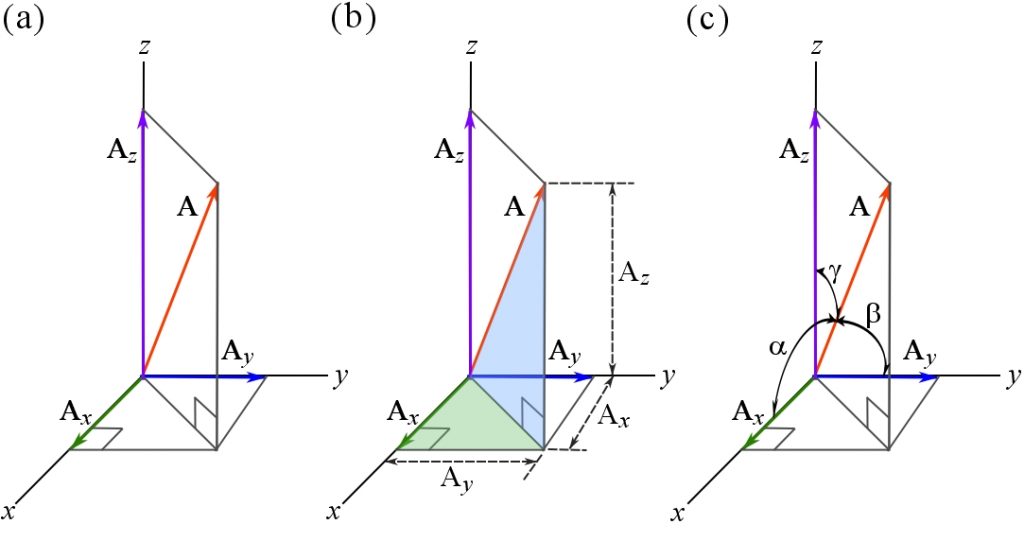
The direction of in a three-dimensional Cartesian coordinate system can be defined by the coordinate direction angles , , and  measured from the positive x, y, and z axes respectively to the vector (Fig. 2.19c). These angles are limited as
measured from the positive x, y, and z axes respectively to the vector (Fig. 2.19c). These angles are limited as  . The following relationship holds between the vector magnitude, the scalar components and the coordinate direction angles,
. The following relationship holds between the vector magnitude, the scalar components and the coordinate direction angles,
(2.4) ![\[A_x=|\bold A|\cos \alpha\quad A_y=|\bold A|\cos \beta\quad A_z=|\bold A|\cos \gamma\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-01b208c65facebea6d2e1557b6370f8d_l3.png "Rendered by QuickLaTeX.com")
The following interactive example illustrates the rectangular components of a vector in three dimensions. Change the scalar components (coordinates of the head point) by the sliders to observe how the vector is expressed in CVN.
The coordinate direction angles of a vector are demonstrated by the following interactive example.
The three coordinate direction angles are not independent and they are related by this equation,
(2.5) ![\[\cos^2\alpha + \cos^2\beta + \cos^2\gamma=1 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-918c80d68832c6a42d384aededbcbf23_l3.png "Rendered by QuickLaTeX.com")
which means that knowing two of the angles, the third one is readily obtainable.
To prove Eq. 2.5, a vector is expressed by its Cartesian components  and divided by its magnitude,
and divided by its magnitude,
![\[\bold u_A = \frac{\bold A}{|\bold A|} = \frac{A_x}{|\bold A|}\bold i + \frac{A_y}{A}\bold j + \frac{A_z}{|\bold A|}\bold k\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9716f368263a409ae284242b29f77e60_l3.png "Rendered by QuickLaTeX.com")
which, by Eq. 2.4, is written as:
![\[\bold u_A=\cos\alpha\bold i + \cos\beta\bold j + \cos\gamma\bold k\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-da2806d268b46330c299c67e6e2d66d2_l3.png "Rendered by QuickLaTeX.com")
and leads to,
![\[\begin{split}|\bold u_A|^2&=|\cos\alpha\bold i + \cos\beta\bold j + \cos\gamma\bold k|^2\\\implies 1&=\cos^2\alpha + \cos^2\beta + \cos^2\gamma\end{split}\]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1e944863000f7a144908777d0c05981d_l3.png "Rendered by QuickLaTeX.com")
which proves Eq. 2.5.
Videos
Cartesian Vector Notation:
Magnitude and Direction (Unit Vector) of a Vector:
Coordinate Direction Angles: