Biomechanics and Bioengineering of Orthopaedics: Gait analysis
Gait analysis is more broadly referred to as motion analysis. The fundamental aim of the motion analysis is to evaluate the functional motor capabilities of individuals and determine the presence of impairments in gait pattern, if any. Motion analysis is also used for different purposes such as determination of the treatment and rehabilitation protocols for abnormal gait, investigation of the effectiveness of orthotics, prosthesis, or exoskeletons, and identification of sports injury risks in a reliable and quantitative manner.
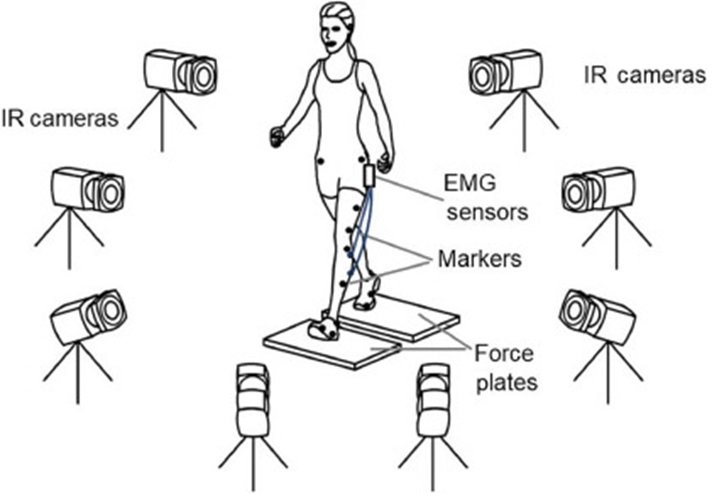
Gait analysis was first performed by taking a video of a person walking and calculating the angles at each joint (Fig. 10-1). With increased technology, it is currently performed with a multiple camera setup and markers placed at each joint to determine the angles accurately. Also added is the EMG to measure the muscle activity at each joint and force plates to measure the ground reaction forces (Fig. 10-1).
Motion capture systems are used to obtain 3D human body kinematics (position, velocity, and acceleration) and force plate systems to obtain kinetic data (directly measured ground reaction force—GRF, and indirectly deduced joints’ moment and power), enabling the researchers to quantitatively evaluate, identify, and interpret the movement (Fig. 10-1).
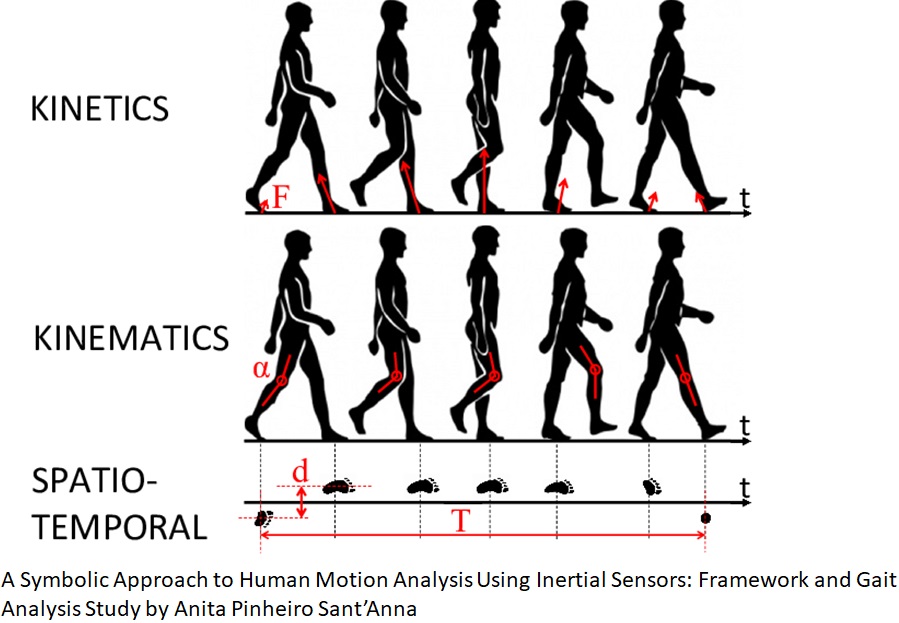
Gait Analysis includes different feature domains. The kinetics gives us information on the forces, the kinematics captures the position, velocity, and acceleration; and the spatio-temporal domain provides data on space or distance and time (Fig. 10-2).
Gait analysis is the study of human locomotion. Gait particularly involves the translatory progression of the body produced by coordinated rotatory movement of body segments.
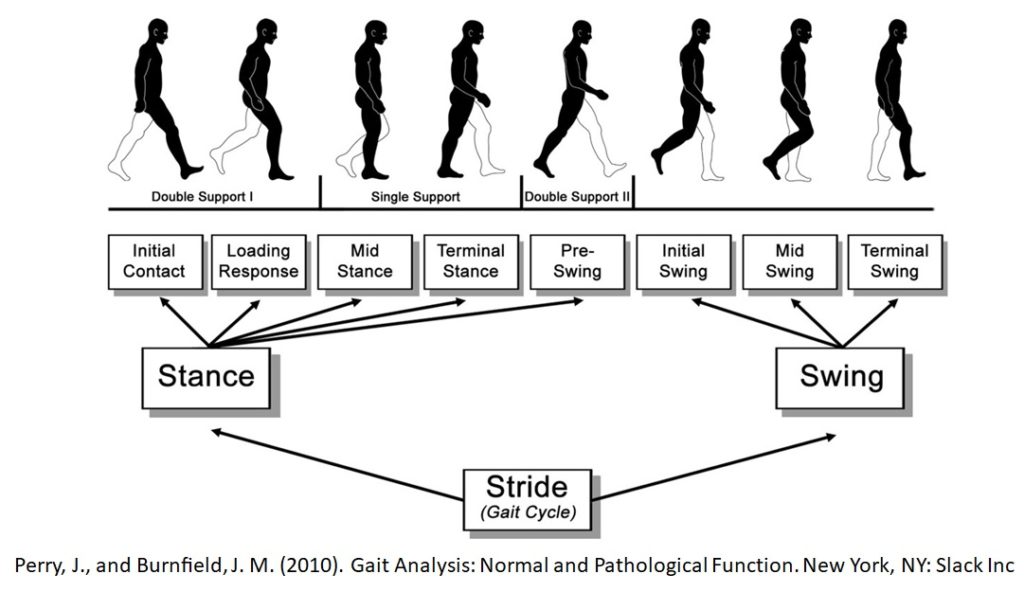
During gait analysis, it is necessary to isolate the shortest, unique, repeatable task during gait. This task is called the gait cycle (Fig. 10-3). A single gait cycle can be measured from any gait event to the same subsequent event on the same foot or better still a gait cycle is measured from one foot strike to the subsequent foot strike of the same foot.
The gait cycle can be broken down into two primary phases, the stance and swing phases, which alternate for each lower limb (Fig. 10-3). The stance phase consists of the entire time that a foot is on the ground whereas the swing phase consists of the entire time that the foot is in the air.
As we study both the spatial and temporal characteristics of the lower limbs, other complementary phases can be introduced, and this identifies 8 phases that capture all the tasks involved in the gait cycle.
When both members of the lower limbs are simultaneously in the stance phase, we refer to this as bipedal support or double support; this occurs 2 times within the gait cycle and forms 10% of the complete cycle. Now, when only one member is in the support phase, we refer to that as unipedal support or single support (40%), the second member at the time will be in oscillating phase.
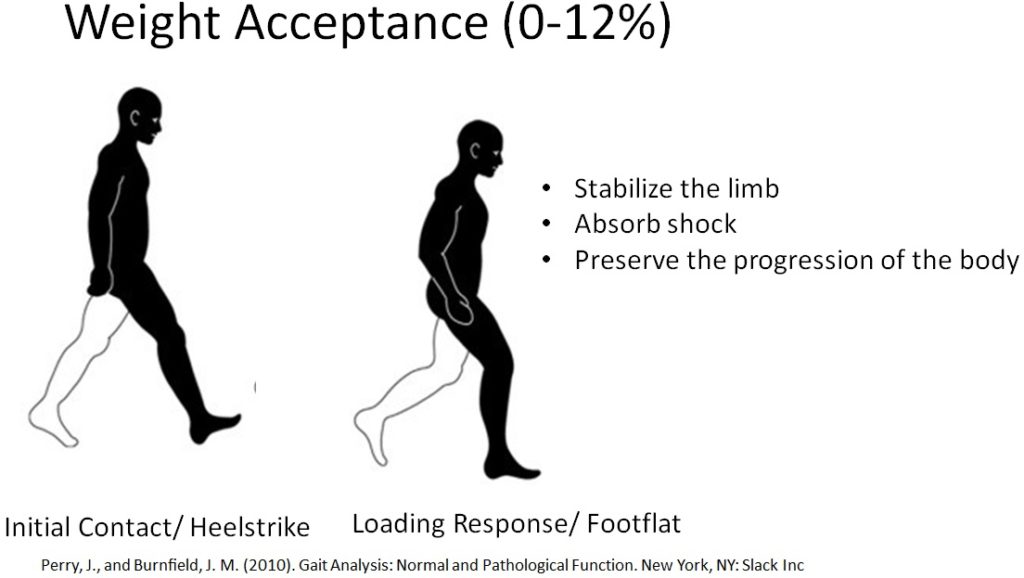
The initial contact and loading response phases constitute weight acceptance and they serve to stabilize the limb, absorb shock and preserve the progression of the body (Fig. 10-4). Initial contactor heelstrike consists of the first 3% of the gait cycle. During a typical gait, the heel strikes the ground and initiates the rotation over the heel to foot flat to preserve progression. This motion is the first rocker of the gait cycle. Loading response or footflat goes from 3-12% of the gait cycle. In this portion, the knee flexes slightly in order to absorb shock as the foot falls flat on the ground, this process offers stability in advance of single limb support.
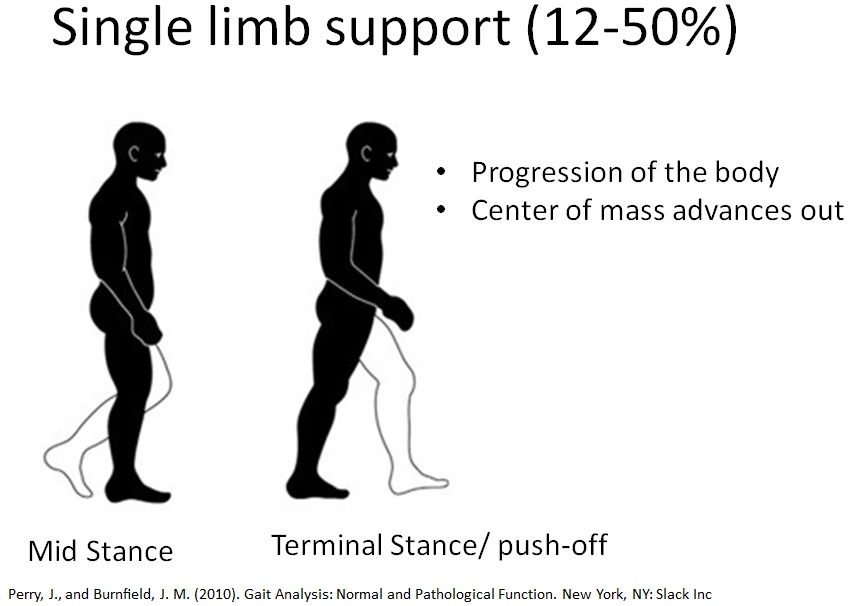
Single limb support involves progression of the body over the foot and weight-bearing stability. The first sub-phase of single limb support is midstance, which is seen during the 12-31% of the gait cycle. During midstance, the shank rotates forward over the supporting foot, creating the second rocker motion of the cycle. This maintains the forward progression of gait.
The second stage of single support is terminal stance or push off which goes from 31-50% of the gait cycle (Fig. 10-5). During terminal stance, the center of mass advances out in front of the supporting foot. The heel raises off the ground as you roll onto the ball of the foot, creating the third rocker motion of the cycle.
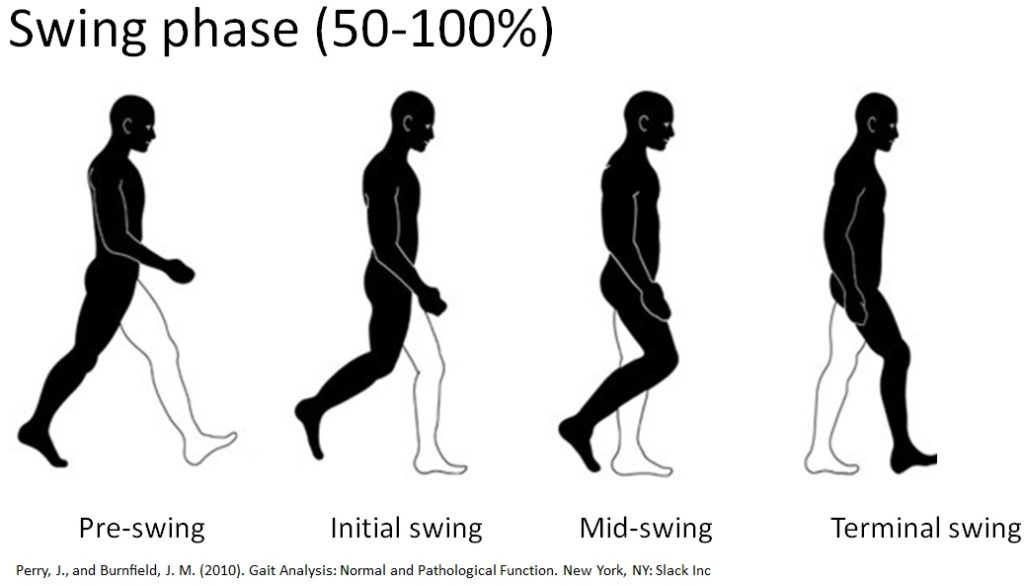
The swing phase can be broken down into 4 sub-phases (Fig. 10-6).
Pre-swing takes place during 50-62% of the gait cycle. Pre-swing is the transition phase between stance and swing, in which the foot is pushed and lifted off of the ground.
Initial swing goes from 62-75% of the gait cycle. During initial swing, the hip, knee, and ankle are flexed to begin advancement of the limb forward and create clearance of the foot over the ground.
Mid-swing goes from 75-87% of the gait cycle. During mid-swing, limb advancement continues, and the thigh reaches its peak advancement.
Terminal swing is the final phase of the gait cycle going from 87-100% of the cycle. During terminal swing, the final advancement of the shank takes place, and the foot is positioned for initial foot contact to start the next gait cycle.
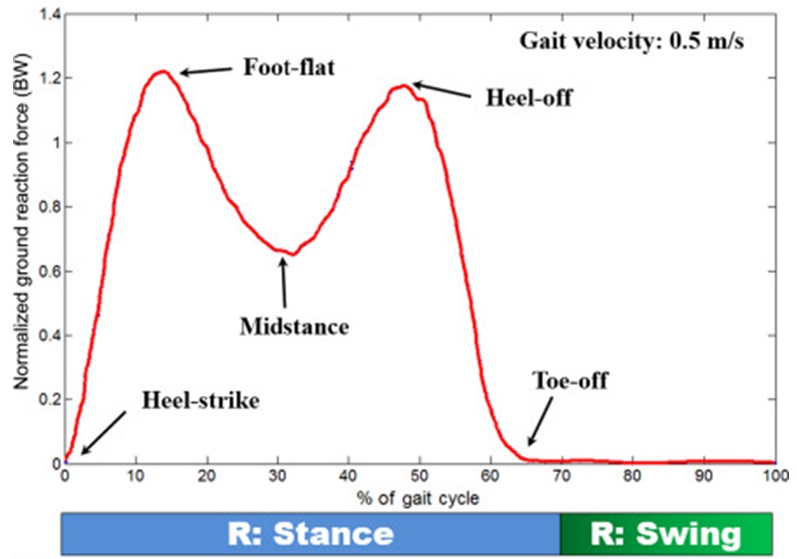
A typical plot of ground reaction forces would look like Fig. 10-7. Force increases from heel-strike to foot-flat, decreases temporarily at midstance and again increases at heel off. On the whole, ground reaction forces are recorded during the stance phase of gait analysis.
An example for runners
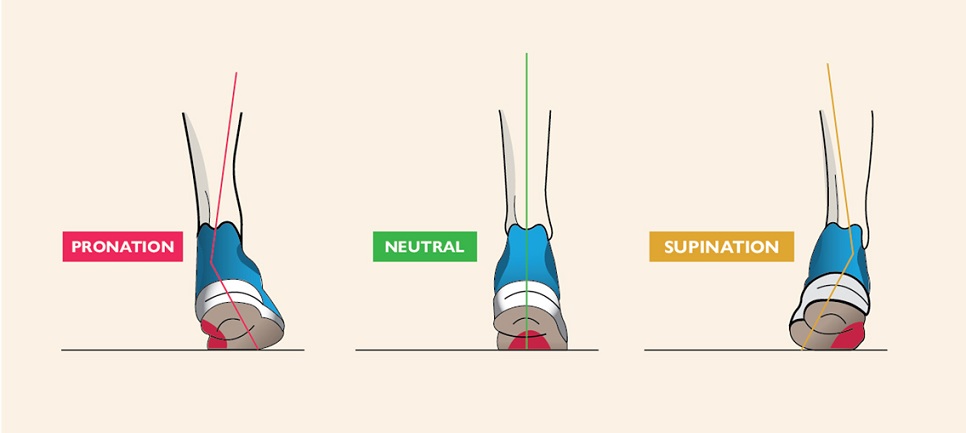
Gait Analysis can be used to recommend the right running shoes to prevent injury (Fig. 10-8).
Pronation: Around 70% of the population overpronate, so this is by far the most common pronation type amongst runners (Fig. 10-8). As the foot is planted it rolls inward excessively, transferring weight to the inner edge instead of centering it on the ball of the foot. It’s usually seen in runners with low arches or flat feet.
Neutral: Neutral pronation occurs when the foot lands on the outer edge and then rolls inward in a controlled manner, distributing weight evenly and helping to absorb shock (Fig. 10-8). On push off, there is an even distribution of pressure from the front of the foot.
Supination or under-pronation: This is when the outer side of the foot strikes the ground at a steeper than normal angle with little or no movement inward, causing a jarring effect, and a large transmission of shock through the lower leg (Fig. 10-8). It’s usually seen in runners with high arches.