
Biomechanics and Bioengineering of Orthopaedics: Tribology and artificial replacements for joints
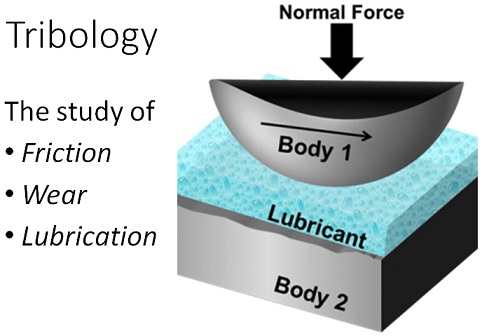
Tribology can be defined as the science and technology of interacting surfaces in relative motion, and includes the study of friction, wear and lubrication (Fig. 7-1).
Friction
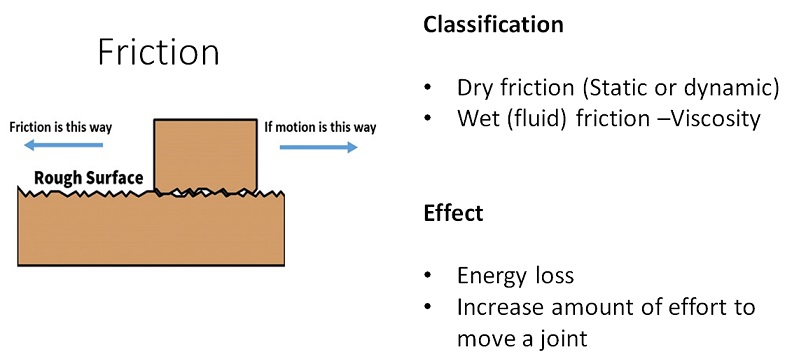
Friction is defined as resistance sliding between 2 bodies in contact. Friction can be classified into dry and wet friction (Fig. 7-2). Dry friction is the force of friction between 2 solid surfaces and wet friction is the force of friction between a solid surface and a liquid surface. Dry friction can also be static friction which is between 2 surfaces at rest or dynamic which is between 2 surfaces on the move. The effects of friction is basically it could cause energy loss, it can increase the amount of effort to move a joint. So essentially friction is bad when it comes to joints.
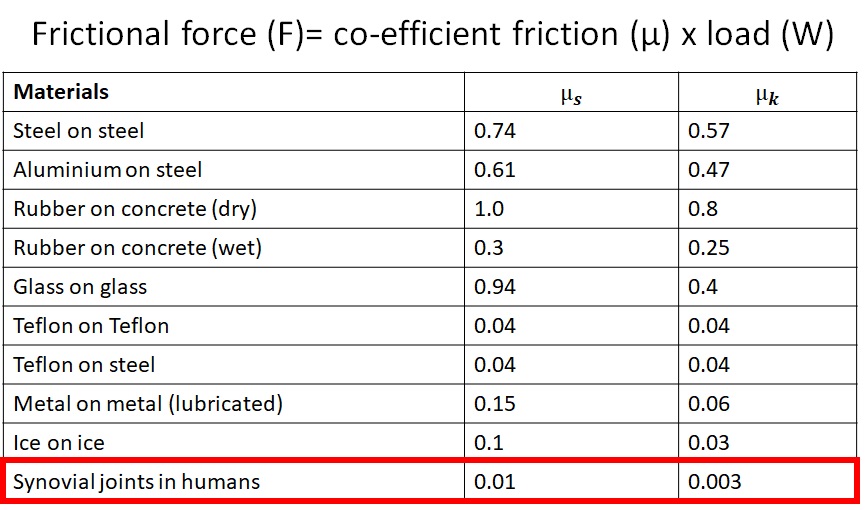
Looking at the laws of Newton when it comes to dry friction, so the first law states that the frictional force equals the coefficient of friction times the load. So what that means is that the coefficient of friction is something that is specific to every articulation. Example; 2 metal surfaces together will have a particular coefficient, a metal on a polymer will have a particular coefficient and an articular joint will also have it’s coefficient of friction. So essentially, every single articulating surface has it’s own unique coefficient of friction and we cannot the change that. The load however, can be changed. So for example, if we increase the load, we will increase the frictional force, just as, if we increase the coefficient of friction, we increase the frictional force.
The table in Fig. 7-3 shows the coefficient for friction of some articulating materials for static and kinetic conditions. The native synovial joint shows the least coefficient of friction.
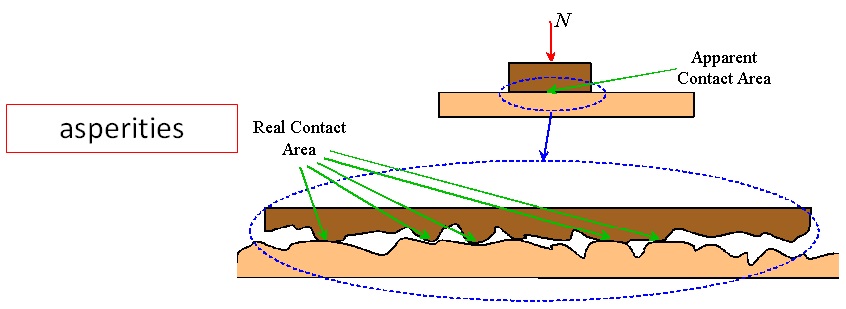
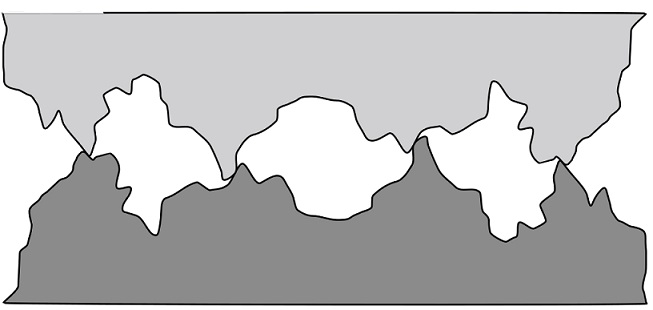
The next law is that the force is independent of the apparent contact surface area (Fig. 7-4). When it comes to friction, we consider an apparent and true contact area. The apparent contact area is what you think you can see of the 2 surfaces in contact. On the microscopic level, however, all surfaces have intrinsic roughness, even those that appear perfectly smooth. So, the bits which are in contact are these little projections from the surface called asperities. So, the bits where the asperities are in contact with each other, that’s called the true or real contact area and that’s why it’s independent of the apparent contact area.
Now, the true contact area is proportional to the load and inversely proportional to the hardness. Hardness is resistance to scratching so basically if a surface scratches very easily, that is if it’s not hard then it will have lots of asperities, so basically it will have a much larger true contact surface area.
Secondly, if you increase the load, it’s going to squash the material down and therefore, the asperities will deform increasing the surface area of contact. And that’s why the true contact area is proportional to the load.
Finally, the kinetic friction force is independent of the sliding speed. This is talking about dynamic friction. That is, no matter how fast or slow you slide 2 surfaces past each other, the friction will be independent of that.
Lubrication
The type of lubrication depends on something called the LAMBDA ratio. There is the boundary lubrication and fluid film lubrication. The boundary lubrication is when there is essentially hardly any gap between the 2 surfaces in contact, only 1 layer or a cell layer thick. Basically, the lambda ratio is the thickness of the fluid film separating 2 surfaces divided by the thickness of the asperities. So, with boundary lubrication this ratio is less than 1 so the fluid film is really thin, the asperities are a bit thicker. Whereas with fluid film, which is the ideal scenario, where we’ve got a ratio of at least 3, a fairly thick fluid film. So essentially, it’s like walking on air, the 2 surfaces are not in contact. So fluid film is great but unfortunately biology is not built this way.
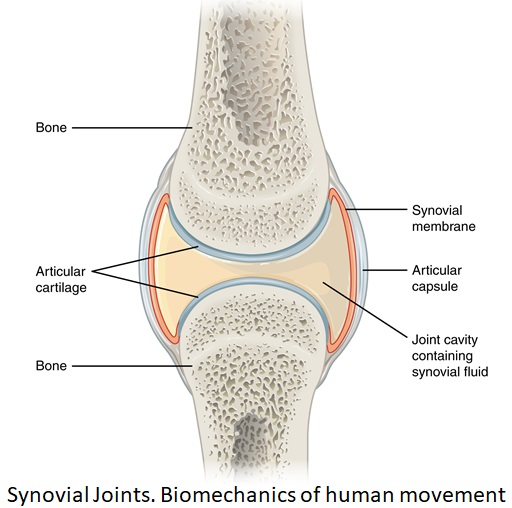
Taking a closer look; a human joint consists of two or more solid bodies (bones), each of which is covered with a porous, elastic layer (cartilage). Between them is a lubricating fluid of viscous nature, that is the synovial fluid which has a number of important constituents such as hyaluronic acid and lubricin, which are important for lubrication of the joints (Fig. 7-5).
This tribo-system is sealed within an impermeable membrane (capsule). The joint is lubricated to achieve minimum friction, and under normal circumstances no wear occurs. In the case of rheumatic disease of the joint, for example, a less favorable tribological situation develops due to the reduced lubricating function of the synovium. Fluid film lubrication ceases, and extreme wear of the joint surfaces can occur. This leads to increased friction values and pain, and in the long term to the replacement of the affected joint.
Fluid film lubrication can be broken down into 3 static types. They are squeeze film, boosted and weeping.
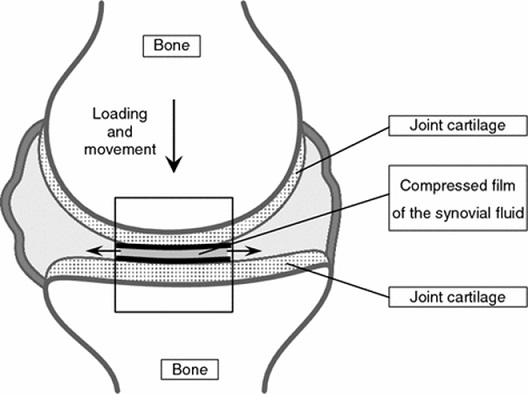
Squeeze film lubrication: With this type of lubrication, 2 surfaces come together and generate a hydrostatic pressure as they force fluid from the gap between the cartilage (Fig. 7-6). This occurs for as long as the fluid is squeezed out. An example will be the heel strike phase of gait.
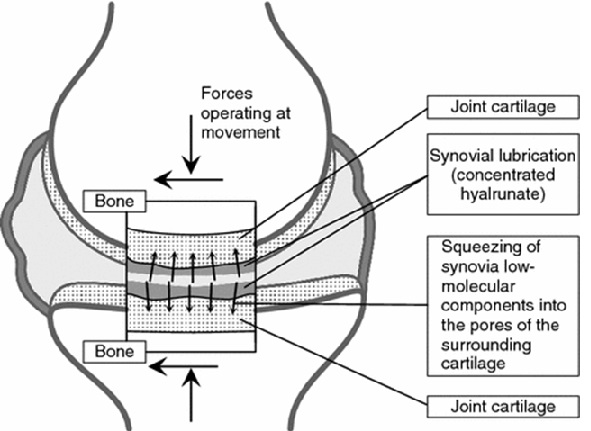
Boosted joint lubrication: Here the same surfaces come together but this time the water moves out of the surface increasing the concentration of Hyaluronic acid in the fluid film (Fig. 7-7).
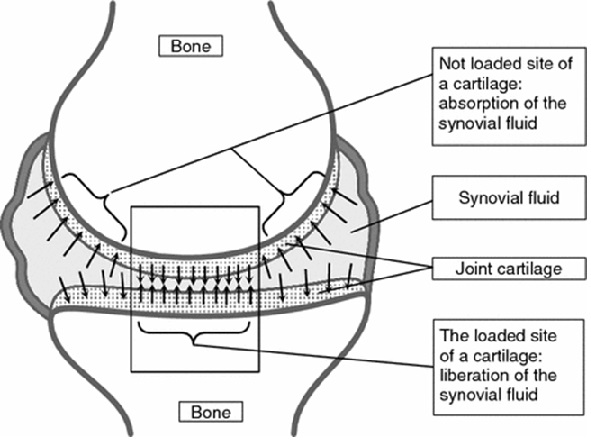
Weeping lubrication: The surfaces are again squeezed together and this time the water moves from the cartilage into the gap and that weeps tears of lubricant which helps to generate a hydrostatic pressure between the gap (Fig. 7-8).
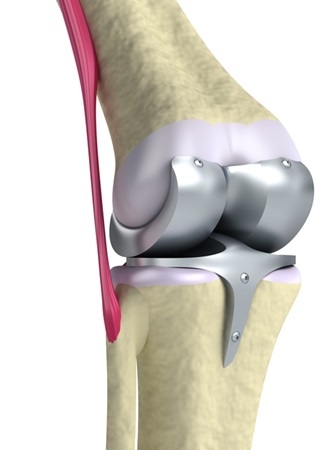
Artificial joint replacements
Artificial joints are used to treat joint diseases such as osteoarthritis and trauma (Fig. 7-9). Studying the tribology of artificial joints are important to enable us optimise the performance of these man-made bearings to improve clinical function. The idea of fluid film lubrication only occurs in the native joint but very rarely in the prosthetic joint. The ideal case would be to get fluid film lubrication in the prosthetic joint. So essentially the 2 surfaces would not come into contact, and they would not wear out. Metal on metal tends to produce this fluid film in an ideal scenario.
Factors determining lubrication: The various factors which determine lubrication are the Geometry of the bearing surfaces and roughness. The magnitude and direction of the applied load. Wettability which is the affinity for lubricant. Lubricant Viscosity, how thick it is and the velocity at which bearing operates.
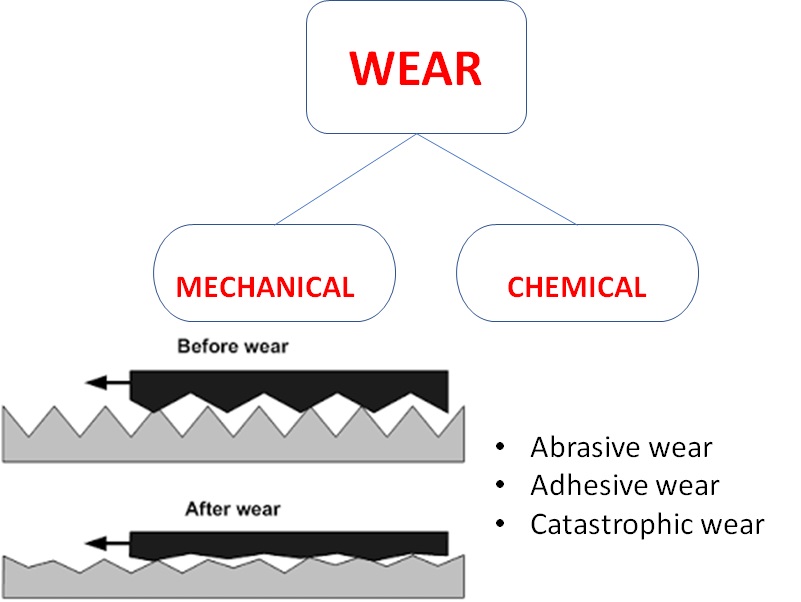
Wear
Wear is the unwanted loss of material from a bearing surface (Fig. 7-10). And the key question here is how are the particles generated? So they could be through mechanical wear or chemical wear which is also known as corrosion. With mechanical wear, we have the abrasive, adhesive and catastrophic types of wear.
An abrasive wear happens when we have a hard bearing surface on a soft bearing surface (Fig. 7-11). Example a metal on a polymer. So the harder surface has the protruding asperities which dig into the softer surface causing a breakdown of wear particles.
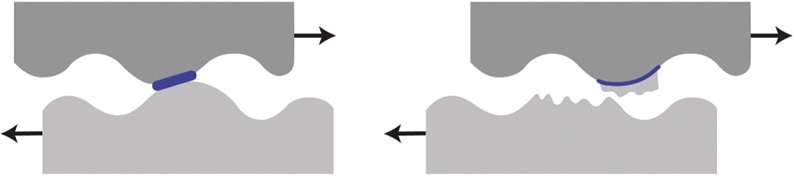
Adhesive wear is where 2 surfaces which are moving past each other get micro-welding between them (Fig. 7-12). The bonds between these surfaces are stronger than the bonds within the surfaces so when they pull apart we get bits of poly break off these surfaces.
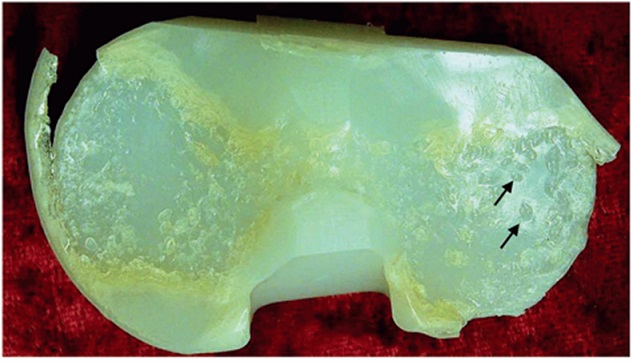
The last is subsurface delamination or catastrophic wear (Fig. 7-13). It occurs in the sub surface layer below the surface of the polymer and is caused by fatigue failure from cyclical loading. They are usually seen in knee replacements.
Chemical wear (Corrosion) is an unwanted dissolution of a metal in a solution (Fig. 7-14). We could have a local corrosion where we have a crevice or a cavity in the metal with a local microenvironment where the PH is greater. We can also have a more generalized form of corrosion in the implant.
