
Introduction to Numerical Analysis: Nonlinear Systems of Equations
We limit our discussion here to nonlinear systems of equations composed of  equations in unknowns. There are some analytical methods to solve these types of equations; however, in general, a numerical algorithm is the fastest way to find a solution. We will present two algorithms, the fixed-point iteration method and the Newton-Raphson method to solve such a system of equations.
equations in unknowns. There are some analytical methods to solve these types of equations; however, in general, a numerical algorithm is the fastest way to find a solution. We will present two algorithms, the fixed-point iteration method and the Newton-Raphson method to solve such a system of equations.
Fixed-Point Iteration Method
Similar to the fixed-point iteration method for finding roots of a single equation, the fixed-point iteration method can be extended to nonlinear systems. This is in fact a simple extension to the iterative methods used for solving systems of linear equations. The fixed-point iteration method proceeds by rearranging the nonlinear system such that the equations have the form.
![\[\begin{split} x_1&=f_1(x_1,x_2,\cdots,x_n)\\ x_2&=f_2(x_1,x_2,\cdots,x_n)\\ &\vdots\\ x_n&=f_n(x_1,x_2,\cdots,x_n) \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9cc2add27c24e2f3a2503436d11ee2f9_l3.png "Rendered by QuickLaTeX.com")
where  is a nonlinear function of the components
is a nonlinear function of the components  . By assuming an initial guess, the new estimates can be obtained in a manner similar to either the Jacobi method or the Gauss-Seidel method described previously for linear systems of equations. Similar to linear systems of equations, the Euclidean norm can be used to check convergence. So, if the components of the vector
. By assuming an initial guess, the new estimates can be obtained in a manner similar to either the Jacobi method or the Gauss-Seidel method described previously for linear systems of equations. Similar to linear systems of equations, the Euclidean norm can be used to check convergence. So, if the components of the vector  after iteration
after iteration  are
are  , and if after iteration
, and if after iteration  the components are:
the components are:  , then, the stopping criterion would be:
, then, the stopping criterion would be:
![\[ \frac{\|x^{(i+1)}-x^{(i)}\|}{\|x^{(i+1)}\|}\leq \varepsilon_s \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9cbcb16ed112d7a289b8e6e33d495bcf_l3.png "Rendered by QuickLaTeX.com")
where
![\[\begin{split} \|x^{(i+1)}-x^{(i)}\|&=\sqrt{(x_1^{(i+1)}-x_1^{(i)})^2+(x_2^{(i+1)}-x_2^{(i)})^2+\cdots+(x_n^{(i+1)}-x_n^{(i)})^2}\\ \|x^{(i+1)}\|&=\sqrt{(x_1^{(i+1)})^2+(x_2^{(i+1)})^2+\cdots+(x_n^{(i+1)})^2}\\ \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f500d45c89c156aa0adbac55267bfee1_l3.png "Rendered by QuickLaTeX.com")
Note that any other norm function can work as well.
Example
Use the fixed-point iteration method with  to find the solution to the following nonlinear system of equations:
to find the solution to the following nonlinear system of equations:
![\[ x_1^2+x_1x_2=10\qquad x_2+3x_1x_2^2=57 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-629a2dce646e445532afcc293024d850_l3.png "Rendered by QuickLaTeX.com")
Solution
The exact solution in the field of real numbers for this system can actually be obtained using Mathematica as shown in the code below.
View Mathematica Code
a = Solve[{x1^2 + x1*x2 == 10, x2 + 3 x1*x2^2 == 57}, {x1, x2}, Reals]
N[a]
The fixed-point iteration numerical method requires rearranging the equations first to the form:
![\[ x=\left(\begin{array}{c}x_1\\x_2\end{array}\right)=f(x)=\left(\begin{array}{c}f_1(x_1,x_2)\\f_2(x_1,x_2)\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-916497dd10d276c4c2cae1799658a4bf_l3.png "Rendered by QuickLaTeX.com")
The following is a possible rearrangement:
![\[ \left(\begin{array}{c}x_1\\x_2\end{array}\right)=\left(\begin{array}{c}\frac{10-x_1^2}{x_2}\\57-3x_1x_2^2\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a66ff23172431d6c9a7637792c1e0251_l3.png "Rendered by QuickLaTeX.com")
Using an initial guess of  and
and  yields the following:
yields the following:
![\[ x_1=\frac{10-(1.5)^2}{3.5}=2.21429\Rightarrow x_2=57-3(2.21429)(3.5)^2=-24.37516 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-49cf68493854fa8bc441cb1100355da9_l3.png "Rendered by QuickLaTeX.com")
For the next iteration, we get:
![\[ x_1=\frac{10-(2.21429)^2}{-24.37516}=-0.20910\Rightarrow x_2=57-3(-0.20910)(-24.37516)^2=429.709 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-8d949e3266826a8988d5657c4b059f88_l3.png "Rendered by QuickLaTeX.com")
Continuing the procedure shows that it is diverging. A different rearrangement for the equations has the form:
![\[ \left(\begin{array}{c}x_1\\x_2\end{array}\right)=\left(\begin{array}{c}\sqrt{10-x_1x_2}\\\sqrt{\frac{57-x_2}{3x_1}}\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-7674077e6923914eaaba302202a75e07_l3.png "Rendered by QuickLaTeX.com")
Using the same initial guesses, the first iteration produces:
![\[ x_1=\sqrt{10-1.5\times 3.5}=2.1794 \Rightarrow x_2=\sqrt{\frac{57-3.5}{3(2.1794)}}=2.86051 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-80a836c2d2347708c450f4f2860aa21c_l3.png "Rendered by QuickLaTeX.com")
The value of  after the first iteration is:
after the first iteration is:
![\[ \varepsilon_r=\frac{\sqrt{(1.5-2.1794)^2+(2.8605-3.5)^2}}{\sqrt{(2.1794)^2+(2.86051)^2}}=0.2595 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-2876dc79a3d0443f6cc13949f2ea9c1e_l3.png "Rendered by QuickLaTeX.com")
The following Microsoft Excel table shows that convergence to  and
and  satisfying the required criterion
satisfying the required criterion  is achieved after 9 iterations.
is achieved after 9 iterations.
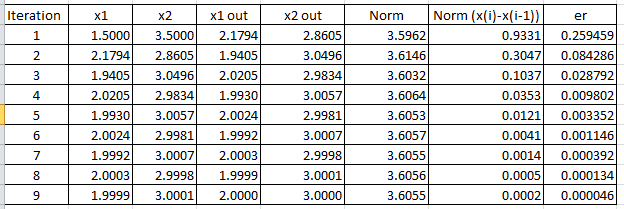
The following code does the same thing in Mathematica to produce the table below:
View Mathematica Codextable = {{1.5, 3.5}};
ErrorTable = {1};
Nmax = 100;
eps = 0.0001;
i = 2;
While[And[ErrorTable[[i - 1]] > eps, i <= Nmax],
x1new = Sqrt[10 - xtable[[i - 1, 1]]*xtable[[i - 1, 2]]];
x2new = Sqrt[(57 - xtable[[i - 1, 2]])/3/x1new];
xnew = {x1new, x2new};
xtable = Append[xtable, xnew];
er = Norm[xnew - xtable[[i - 1]]]/Norm[xnew];
ErrorTable = Append[ErrorTable, er]; i = i + 1];
Title = {"Iteration", "x1_in", "x2_in", "x1_out", "x2_out", "Er"};
T2 = Table[{i, xtable[[i, 1]], xtable[[i, 2]], xtable[[i + 1, 1]], xtable[[i + 1, 2]], ErrorTable[[i + 1]]}, {i, 1, Length[xtable] - 1}];
T2 = Prepend[T2, Title];
T2 // MatrixForm
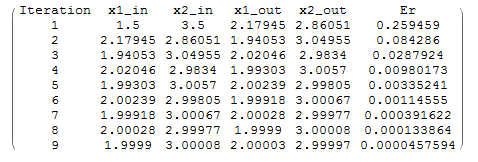
The example here shows that the fixed-point iteration method is not guaranteed to give a possible solution. In fact, the initial guess and the form chosen affect whether a solution can be obtained or not. Note that the “FixedPointList” built-in function in Mathematica can be used to implement the method with an initial guess. Notice in the code below how the function  outputs the vector as a list and that the second component uses the output of the first component:
outputs the vector as a list and that the second component uses the output of the first component:
g[x_] := (x1 = Sqrt[10 - x[[1]]*x[[2]]]; {x1, Sqrt[(57 - x[[2]])/3/x1]})
FixedPointList[g[#] &, {1.5, 3.5}, 20]
Newton-Raphson Method
The Newton-Raphson method is the method of choice for solving nonlinear systems of equations. Many engineering software packages (especially finite element analysis software) that solve nonlinear systems of equations use the Newton-Raphson method. The derivation of the method for nonlinear systems is very similar to the one-dimensional version in the root finding section. Assume a nonlinear system of equations of the form:
![\[\begin{split} f_1(x_1,x_2,\cdots,x_n)&=0\\ f_2(x_1,x_2,\cdots,x_n)&=0\\ &\vdots\\ f_n(x_1,x_2,\cdots,x_n)&=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-09564db9f5b122a6ef7dd81f8b73e427_l3.png "Rendered by QuickLaTeX.com")
If the components of one iteration  are known as: , then, the Taylor expansion of the first equation around these components is given by:
are known as: , then, the Taylor expansion of the first equation around these components is given by:
![\[\begin{split} f_1\left(x_1^{(i+1)},x_2^{(i+1)},\cdots,x_n^{(i+1)}\right)\approx&f_1\left(x_1^{(i)},x_2^{(i)},\cdots,x_n^{(i)}\right)+\\ &\frac{\partial f_1}{\partial x_1}\bigg|_{x^{(i)}}\left(x_1^{(i+1)}-x_1^{(i)}\right)+\frac{\partial f_1}{\partial x_2}\bigg|_{x^{(i)}}\left(x_2^{(i+1)}-x_2^{(i)}\right)+\cdots+\\ &\frac{\partial f_1}{\partial x_n}\bigg|_{x^{(i)}}\left(x_n^{(i+1)}-x_n^{(i)}\right) \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f24fbf8fb01b29027ce0d4a3e952a9c1_l3.png "Rendered by QuickLaTeX.com")
Applying the Taylor expansion in the same manner for  , we obtained the following system of linear equations with the unknowns being the components of the vector
, we obtained the following system of linear equations with the unknowns being the components of the vector  :
:
![\[ \left(\begin{array}{c}f_1\left(x^{(i+1)}\right)\\f_2\left(x^{(i+1)}\right)\\\vdots \\ f_n\left(x^{(i+1)}\right)\end{array}\right) = \left(\begin{array}{c}f_1\left(x^{(i)}\right)\\f_2\left(x^{(i)}\right)\\\vdots \\ f_n\left(x^{(i)}\right)\end{array}\right)+ \left(\begin{matrix}\frac{\partial f_1}{\partial x_1}\big|_{x^{(i)}} & \frac{\partial f_1}{\partial x_2}\big|_{x^{(i)}} &\cdots&\frac{\partial f_1}{\partial x_n}\big|_{x^{(i)}} \\\frac{\partial f_2}{\partial x_1}\big|_{x^{(i)}} & \frac{\partial f_2}{\partial x_2}\big|_{x^{(i)}} & \cdots & \frac{\partial f_2}{\partial x_n}\big|_{x^{(i)}}\\\vdots&\vdots&\vdots&\vdots\\ \frac{\partial f_n}{\partial x_1}\big|_{x^{(i)}} & \frac{\partial f_n}{\partial x_2}\big|_{x^{(i)}} &\cdots& \frac{\partial f_n}{\partial x_n}\big|_{x^{(i)}} \end{matrix}\right)\left(\begin{array}{c}\left(x_1^{(i+1)}-x_1^{(i)}\right)\\\left(x_2^{(i+1)}-x_2^{(i)}\right)\\\vdots\\\left(x_n^{(i+1)}-x_n^{(i)}\right)\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-3d7617d7ec3b6f0025bc5d7ff75ea76d_l3.png "Rendered by QuickLaTeX.com")
By setting the left hand side to zero (which is the desired value for the functions  , then, the system can be written as:
, then, the system can be written as:
![\[ \left(\begin{matrix}\frac{\partial f_1}{\partial x_1}\big|_{x^{(i)}} & \frac{\partial f_1}{\partial x_2}\big|_{x^{(i)}} &\cdots&\frac{\partial f_1}{\partial x_n}\big|_{x^{(i)}} \\\frac{\partial f_2}{\partial x_1}\big|_{x^{(i)}} & \frac{\partial f_2}{\partial x_2}\big|_{x^{(i)}} & \cdots & \frac{\partial f_2}{\partial x_n}\big|_{x^{(i)}}\\\vdots&\vdots&\vdots&\vdots\\ \frac{\partial f_n}{\partial x_1}\big|_{x^{(i)}} & \frac{\partial f_n}{\partial x_2}\big|_{x^{(i)}} &\cdots& \frac{\partial f_n}{\partial x_n}\big|_{x^{(i)}} \end{matrix}\right)\left(\begin{array}{c}\left(x_1^{(i+1)}-x_1^{(i)}\right)\\\left(x_2^{(i+1)}-x_2^{(i)}\right)\\\vdots\\\left(x_n^{(i+1)}-x_n^{(i)}\right)\end{array}\right)= -\left(\begin{array}{c}f_1\left(x^{(i)}\right)\\f_2\left(x^{(i)}\right)\\\vdots \\ f_n\left(x^{(i)}\right)\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-638c516ce27af32edb0bd2968e6d8776_l3.png "Rendered by QuickLaTeX.com")
Setting  , the above equation can be written in matrix form as follows:
, the above equation can be written in matrix form as follows:
![\[ K \Delta x=-f \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-95d779e4ff0bf3641210daa38432f540_l3.png "Rendered by QuickLaTeX.com")
where  is an
is an  matrix,
matrix,  is a vector of components and
is a vector of components and  is an -dimensional vector with the components
is an -dimensional vector with the components  . If is invertible, then, the above system can be solved as follows:
. If is invertible, then, the above system can be solved as follows:
![\[ \Delta x = -K^{-1}f \Rightarrow x^{(i+1)}=x^{(i)}+\Delta x \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-4ec7771d6f991a10b9f9be1e8ed84590_l3.png "Rendered by QuickLaTeX.com")
Example
Use the Newton-Raphson method with to find the solution to the following nonlinear system of equations:
Solution
In addition to requiring an initial guess, the Newton-Raphson method requires evaluating the derivatives of the functions  and
and  . If
. If  , then it has the following form:
, then it has the following form:
![\[ K=\left(\begin{matrix}\frac{\partial f_1}{\partial x_1}& \frac{\partial f_1}{\partial x_2}\\\frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2}\end{matrix}\right)=\left(\begin{matrix}2x_1+x_2& x_1\\3x_2^2 & 1+6x_1x_2\end{matrix}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-3891cede2c9a5c70cb97cfeb19cefe9f_l3.png "Rendered by QuickLaTeX.com")
Assuming an initial guess of  and
and  , then the vector
, then the vector  and the matrix have components:
and the matrix have components:
![\[ f=\left(\begin{array}{c}x_1^2+x_1x_2-10\\x_2+3x_1x_2^2-57\end{array}\right)=\left(\begin{array}{c}-2.5\\1.625\end{array}\right) \qquad K=\left(\begin{matrix}6.5 & 1.5 \\ 36.75 & 32.5\end{matrix}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ab2be4d937a949e0892e6cbe4cda5577_l3.png "Rendered by QuickLaTeX.com")
The components of the vector can be computed as follows:
![\[ \Delta x = -K^{-1}f=\left(\begin{array}{c}0.53603\\-0.65612\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9b4123c2277ba8499113670d360bb1c6_l3.png "Rendered by QuickLaTeX.com")
Therefore, the new estimates for  and
and  are:
are:
![\[ x^{(1)}=x^{(0)}+\Delta x=\left(\begin{array}{c}2.036029\\2.843875\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-bed4bee695d89da186e39399a3267ec2_l3.png "Rendered by QuickLaTeX.com")
The approximate relative error is given by:
![\[ \varepsilon_r=\frac{\sqrt{(0.53603)^2+(-0.65612)^2}}{\sqrt{(2.036029)^2+(2.843875)^2}}=0.2422 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-390ce03c03a29d0aedaef41555c10b1f_l3.png "Rendered by QuickLaTeX.com")
For the second iteration the vector and the matrix have components:
![\[ f=\left(\begin{array}{c}-0.06437\\-4.75621\end{array}\right) \qquad K=\left(\begin{matrix}6.9159 & 2.0360 \\ 24.2629 & 35.7413\end{matrix}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-508063a6504d7a676306f2dbda24f0fa_l3.png "Rendered by QuickLaTeX.com")
The components of the vector can be computed as follows:
![\[ \Delta x = -K^{-1}f=\left(\begin{array}{c}-0.03733\\0.15841\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d91be0f80a8d5e6038c48a61e2169ee1_l3.png "Rendered by QuickLaTeX.com")
Therefore, the new estimates for  and
and  are:
are:
![\[ x^{(2)}=x^{(1)}+\Delta x=\left(\begin{array}{c}1.998701\\3.002289\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ecc9e0c28e5c561187743ac03f6bb70d_l3.png "Rendered by QuickLaTeX.com")
The approximate relative error is given by:
![\[ \varepsilon_r=\frac{\sqrt{(-0.03733)^2+(0.15841)^2}}{\sqrt{(1.998701)^2+(3.002289)^2}}=0.04512 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d9385063946dbfd07c37abedc1a266d6_l3.png "Rendered by QuickLaTeX.com")
For the third iteration the vector and the matrix have components:
![\[ f=\left(\begin{array}{c}-0.00452\\0.04957\end{array}\right) \qquad K=\left(\begin{matrix}6.9997 & 1.9987 \\ 27.0412 & 37.0041\end{matrix}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-71899249329b64cf887bbe02230d93a5_l3.png "Rendered by QuickLaTeX.com")
The components of the vector can be computed as follows:
![\[ \Delta x = -K^{-1}f=\left(\begin{array}{c}0.00130\\-0.00229\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c6547342d1cffa3e8985c49e5f43c039_l3.png "Rendered by QuickLaTeX.com")
Therefore, the new estimates for  and
and  are:
are:
![\[ x^{(3)}=x^{(2)}+\Delta x=\left(\begin{array}{c}2.00000\\2.999999\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-4349b1b31af5408e2bab3cb6f4749af5_l3.png "Rendered by QuickLaTeX.com")
The approximate relative error is given by:
![\[ \varepsilon_r=\frac{\sqrt{(0.00130)^2+(-0.00229)^2}}{\sqrt{(2.00000)^2+(2.999999)^2}}=0.00073 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-541629c0ed37f16c4446aef7c87e8314_l3.png "Rendered by QuickLaTeX.com")
Finally, for the fourth iteration the vector and the matrix have components:
![\[ f=\left(\begin{array}{c}0.00000\\-0.00002\end{array}\right) \qquad K=\left(\begin{matrix}7 & 2 \\ 27 & 37\end{matrix}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e3d72430b60ddac4d4d8ea432f7a75fd_l3.png "Rendered by QuickLaTeX.com")
The components of the vector can be computed as follows:
![\[ \Delta x = -K^{-1}f=\left(\begin{array}{c}0.00000\\0.00000\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5e1fbec24221643bd02754320778d23b_l3.png "Rendered by QuickLaTeX.com")
Therefore, the new estimates for  and
and  are:
are:
![\[ x^{(4)}=x^{(3)}+\Delta x=\left(\begin{array}{c}2\\3\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-be9ffdb6b2a3cf39d6df96c3e36175e2_l3.png "Rendered by QuickLaTeX.com")
The approximate relative error is given by:
![\[ \varepsilon_r=\frac{\sqrt{(0.00000)^2+(0.00000)^2}}{\sqrt{(2)^2+(3)^2}}=0.00000 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-db691cf8afd98635fdb38aeb24e6d676_l3.png "Rendered by QuickLaTeX.com")
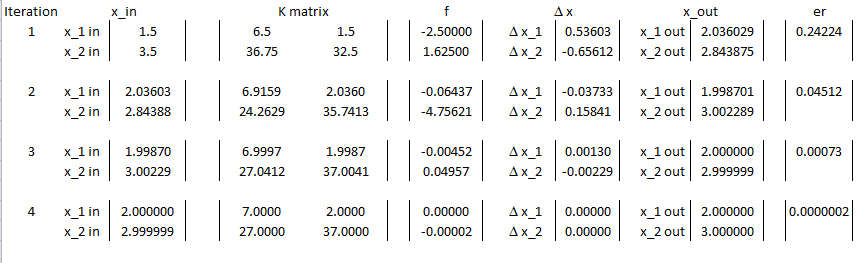
Therefore, convergence is achieved after 4 iterations which is much faster than the 9 iterations in the fixed-point iteration method. The following is the Microsoft Excel table showing the values generated in every iteration:
The Newton-Raphson method can be implemented directly in Mathematica using the “FindRoot” built-in function:
View Mathematica Code
FindRoot[{x1^2 + x1*x2 - 10 == 0, x2 + 3*x1*x2^2 == 57}, {{x1, 1.5}, {x2, 3.5}}]
The following “While” loop in Mathematica provides an iterative procedure that implements the Newton-Raphson Method in Mathematica and produces the table shown:
View Mathematica Code
x = {x1, x2};
f1 = x1^2 + x1*x2 - 10;
f2 = x2 + 3 x1*x2^2 - 57;
f = {f1, f2};
K = Table[D[f[[i]], x[[j]]], {i, 1, 2}, {j, 1, 2}];
K // MatrixForm
xtable = {{1.5, 3.5}};
xrule = {{x1 -> xtable[[1, 1]], x2 -> xtable[[1, 2]]}};
Ertable = {1}
NMax = 100;
i = 1;
eps = 0.000001
While[And[Ertable[[i]] > eps, i <= NMax],
Delta = -(Inverse[K].f) /. xrule[[i]];
xtable = Append[xtable, Delta + xtable[[Length[xtable]]]];
xrule = Append[
xrule, {x1 -> xtable[[Length[xtable], 1]],
x2 -> xtable[[Length[xtable], 2]]}];
er = Norm[Delta]/Norm[xtable[[i+1]]]; Ertable = Append[Ertable, er]; i++]
Title = {"Iteration", "x1_in", "x2_in", "x1_out", "x2_out", "er"};
T2 = Table[{i, xtable[[i, 1]], xtable[[i, 2]], xtable[[i + 1, 1]], xtable[[i + 1, 2]], Ertable[[i + 1]]}, {i, 1, Length[xtable] - 1}];
T2 = Prepend[T2, Title];
T2 // MatrixForm

Linear vs. Nonlinear Analysis of Structures: An Application
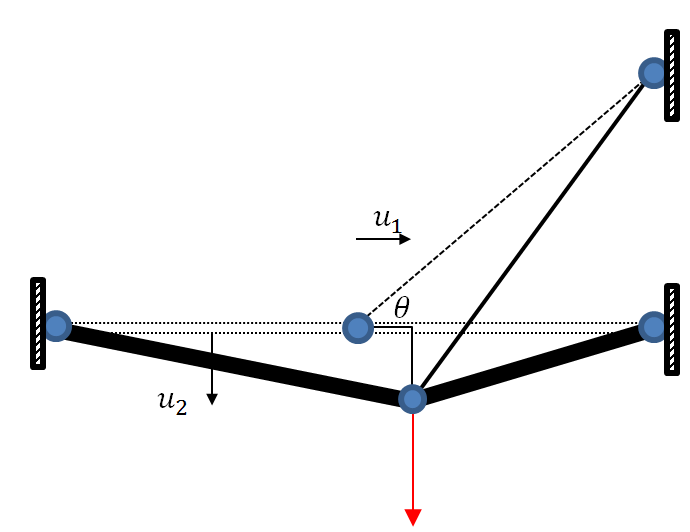
Most structural engineering problems in which the displacements and forces inside a structure are sought can be formulated using linear systems of equations. This is done by invoking certain assumptions that simplify the problem. However, when a structure undergoes large deformations, the problem has to be formulated using nonlinear systems of equations. The following is an example of a truss structure that aims at clarifying the difference.
Example
Two steel truss members with areas  and
and  are connected to a steel cable with an area
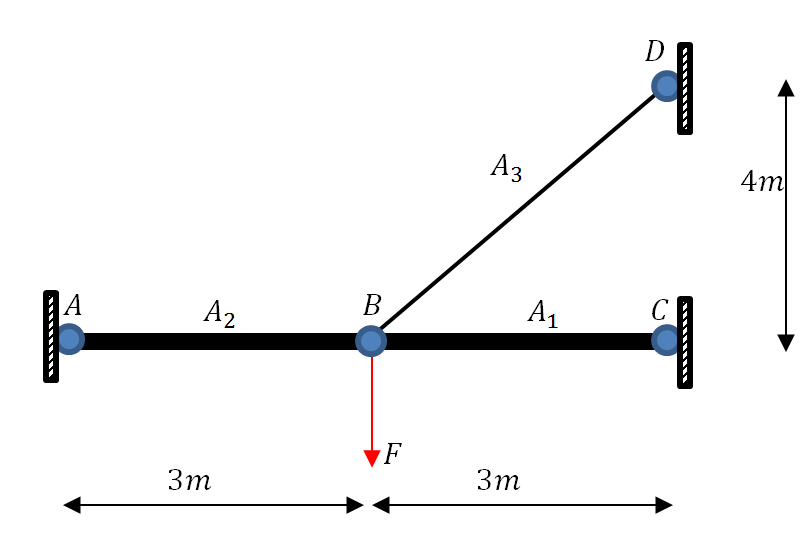
are connected to a steel cable with an area  as shown in the figure. All the connections are hinged connections allowing free relative rotations. Points
as shown in the figure. All the connections are hinged connections allowing free relative rotations. Points  ,
,  , and
, and  are fixed by means of hinges preventing displacements but allowing free rotations. Assuming that the horizontal displacement of point
are fixed by means of hinges preventing displacements but allowing free rotations. Assuming that the horizontal displacement of point  is
is  to the right and the vertical displacement of point is
to the right and the vertical displacement of point is  downwards. Assume that Young’s modulus
downwards. Assume that Young’s modulus  ,
,  , and
, and  . The force in each member is equal to
. The force in each member is equal to  where
where  where
where  is the member number,
is the member number,  is the undeformed length,
is the undeformed length,  is the deformed length,
is the deformed length,  is the longitudinal stress,
is the longitudinal stress,  is the strain, and
is the strain, and  is Young’s modulus in member . Find the values of and at equilibrium using: 1) Linear analysis where the displacements are assumed to be small, and 2) Nonlinear analysis. Solve twice, once with
is Young’s modulus in member . Find the values of and at equilibrium using: 1) Linear analysis where the displacements are assumed to be small, and 2) Nonlinear analysis. Solve twice, once with  , and another time with
, and another time with  . Do the two solution strategies give the same answer?
. Do the two solution strategies give the same answer?
Solution
The units adopted will be  for forces,
for forces,  for lengths, and
for lengths, and  for
for  . The following is the displaced shape of the structure. The middle hinge move horizontally to the right a distance and vertically downards a distance . There are two unknowns in the problem and . These can be found using two equations of equilibrium at the middle hinge. The two equations are the sum of the vertical and horizontal forces, each equal to zero.
. The following is the displaced shape of the structure. The middle hinge move horizontally to the right a distance and vertically downards a distance . There are two unknowns in the problem and . These can be found using two equations of equilibrium at the middle hinge. The two equations are the sum of the vertical and horizontal forces, each equal to zero.
Linear Analysis
In linear analysis, the truss member length is assumed to only change due to displacements along its longitudinal axis. In other words, the forces in the truss member do not change if it simply rotates. In addition, the forces are assumed to be aligned with the original geometry of the structure before deformations. The strains in each member are given by:  ,
,  , and
, and  . Therefore, the forces in each member can be calculated as follows:
. Therefore, the forces in each member can be calculated as follows:
![\[ \begin{split} F_1&=E_1A_1\varepsilon_1=E\left(\frac{200}{1000000}\right)\frac{-u_1}{3}\\ F_2&=E_2A_2\varepsilon_2=E\left(\frac{200}{1000000}\right)\frac{u_1}{3}\\ F_3&=E_3A_3\varepsilon_3=E\left(\frac{50}{1000000}\right)\frac{u_2\sin{(\theta)}-u_1\cos{(\theta)}}{5} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-fd39fcbc13056b5f73bdd6069e8a9d0d_l3.png "Rendered by QuickLaTeX.com")
where  ,
,  , and
, and  . Assuming small deformations, equilibrium at point can be analyzed using the following forces diagram:
. Assuming small deformations, equilibrium at point can be analyzed using the following forces diagram:
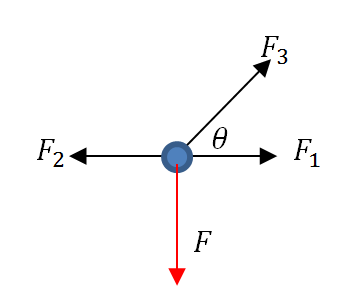
The first equation is the sum of horizontal forces equals to zero:
![\[ F_1+F_3\cos{(\theta)}-F_2=\frac{-81260000}{3}u_1+960000u_2=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5a320c2e2515f31a9f2cfc39086e3845_l3.png "Rendered by QuickLaTeX.com")
The second equation is the sum of the vertical forces equal to zero:
![\[ F-F_3\sin{(\theta)}=F+960000u_1-1280000 u_2=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c4eed18f5f9f9c152637314028281b53_l3.png "Rendered by QuickLaTeX.com")
These equations are linear and can be written in matrix form as follows:
![\[ \left(\begin{matrix} \frac{-81260000}{3} & 960000\\ 960000 & -1280000\end{matrix}\right)\left(\begin{array}{c} u_1\\u_2\end{array}\right)=\left(\begin{array}{c} 0\\-F\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-eb8534d43fd151652eff3febefe60bd2_l3.png "Rendered by QuickLaTeX.com")
Setting yields a solution  and
and  , while setting
, while setting  yields
yields  and
and  . Notice that in a linear analysis, the displacements are directly proportional to the applied load, that is, the ratio between at
. Notice that in a linear analysis, the displacements are directly proportional to the applied load, that is, the ratio between at  and at is equal to
and at is equal to  . The same applies to .
. The same applies to .
The following is the Mathematica code to formulate and solve the above system of equations using the “Solve” function.
View Mathematica Code
Clear[F, Ee];
Ee = 200 (10^9);
eps1 = -u1/3;
A1 = A2 = 200/1000000;
A3 = 50/1000000;
eps2 = u1/3;
Cth = 3/5;
Sth = 4/5;
eps3 = (-u1*Cth + u2*Sth)/5;
F1 = Ee*A1*eps1;
F2 = Ee*A2*eps2;
F3 = Ee*A3*eps3;
Eq1 = Expand[(F1 + F3*Cth - F2)]
Eq2 = Expand[F - F3*Sth]
sol1 = Solve[{Eq1 == 0.0, Eq2 == 0.0 /. F -> 10000}]
sol2 = Solve[{Eq1 == 0.0, Eq2 == 0.0 /. F -> 500000}]
Nonlinear Analysis
In a nonlinear analysis, the analysis takes into consideration the displaced position of the structure without any simplified assumptions. Looking at the first truss member, the displaced structure is shown in the following figure.
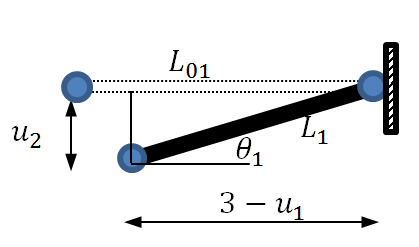
For this member, the original length  , the final length
, the final length  , the strain
, the strain  and the angle of inclination
and the angle of inclination  is such that
is such that  and
and  .
.
For the second truss member, the displaced structure is shown in the following figure.
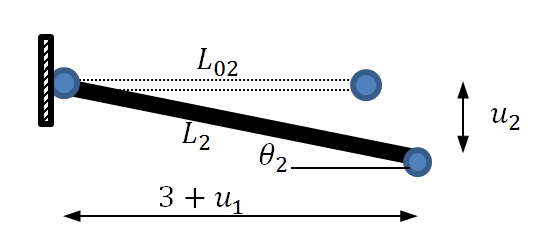
For this member, the original length  , the final length
, the final length  , the strain
, the strain  and the angle of inclination
and the angle of inclination  is such that
is such that  and
and  .
.
For the third truss member, the displaced structure is shown in the following figure.
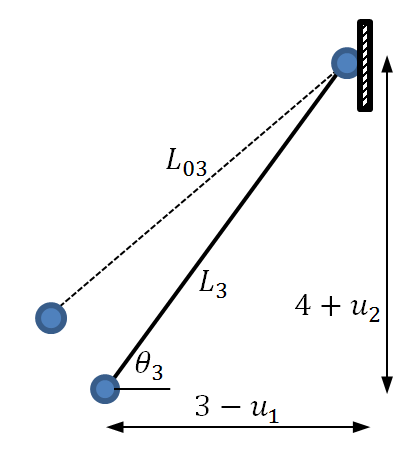
For this member, the original length  , the final length
, the final length  , the strain
, the strain  and the angle of inclination
and the angle of inclination  is such that
is such that  and
and  .
.
Finally, the equations of equilibrium can be written taking into consideration the inclination of each member:
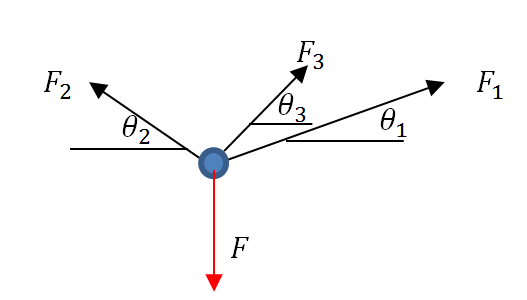
The first equation is the sum of horizontal forces equals to zero:
![\[ F_1\cos{(\theta_1)}+F_3\cos{(\theta_3)}-F_2\cos{(\theta_2)}=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e8b9b4cca1f51f5df45bf744baff28d0_l3.png "Rendered by QuickLaTeX.com")
The second equation is the sum of the vertical forces equal to zero:
![\[ F-F_1\sin{(\theta_1)}-F_2\sin{(\theta_2)}-F_3\sin{(\theta_3)}=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-faba28b536a30b68b2037763ec643029_l3.png "Rendered by QuickLaTeX.com")
The following is a screenshot of the Mathematica output of the two equations:

Setting yields a solution and , while setting yields  and
and  . For small deformations under small applied loads, the linear analysis and nonlinear analysis produce exactly the same results. In this situation, the rotations of the members are very small such that the original shape and the deformed shape can be assumed to be the same. However, under large loads, the linear analysis is no longer valid. The two solutions at are far from each other with the nonlinear analysis solution giving less displacement. In this particular situation, as the structure deforms, the nonlinear effects cause the structure to be more rigid and therefore exhibit less deformations. Cable structures with large loads and large deformations in the cables need to be analyzed using a nonlinear analysis rather than a linear analysis.
. For small deformations under small applied loads, the linear analysis and nonlinear analysis produce exactly the same results. In this situation, the rotations of the members are very small such that the original shape and the deformed shape can be assumed to be the same. However, under large loads, the linear analysis is no longer valid. The two solutions at are far from each other with the nonlinear analysis solution giving less displacement. In this particular situation, as the structure deforms, the nonlinear effects cause the structure to be more rigid and therefore exhibit less deformations. Cable structures with large loads and large deformations in the cables need to be analyzed using a nonlinear analysis rather than a linear analysis.
The following is the Mathematica code to formulate and solve the above nonlinear system of equations using the “FindRoot” function with an initial guess of  , and
, and  .
.
Ee = 200 (10^9);
A1 = A2 = 200/1000000;
A3 = 50/1000000;
L1 = Sqrt[(3 - u1)^2 + u2^2];
Sth1 = u2/L1;
Cth1 = (3 - u1)/L1;
L2 = Sqrt[(3 + u1)^2 + u2^2];
Sth2 = u2/L2;
Cth2 = (3 + u1)/L2;
L3 = Sqrt[(3 - u1)^2 + (4 + u2)^2];
Cth3 = (3 - u1)/L3;
Sth3 = (4 + u2)/L3;
eps1 = (L1 - 3)/3;
eps2 = (L2 - 3)/3;
eps3 = (L3 - 5)/5;
F1 = Ee*A1*eps1;
F2 = Ee*A2*eps2;
F3 = Ee*A3*eps3;
Eq1 = Simplify[F1*Cth1 - F2*Cth2 + F3*Cth3]
Eq2 = Simplify[F - F1*Sth1 - F2*Sth2 - F3*Sth3]
sol1 = FindRoot[{Eq1 == 0, Eq2 == 0 /. F -> 10000}, {{u1, 0}, {u2, 0}}]
sol2 = FindRoot[{Eq1 == 0, Eq2 == 0 /. F -> 500000}, {{u1, 0}, {u2, 0}}]
Problems
- Use your implementation of the Newton-Raphson method to find 4 different sets of roots for the following nonlinear system of equations:
![\[ \begin{split} 4-2x_1^2-x_2&=0\\ 8-4x_1-x_2^2&=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-0f7af31836d426a63f49485ddc0f7cbe_l3.png "Rendered by QuickLaTeX.com")
Use
. Compare with the “FindRoot” built-in function in Mathematica. - Use your implementation of the Newton-Raphson method to find 1 set of roots for the following nonlinear system of equations:
![\[ \begin{split} y=-x^2+x+0.5\\ y+5xy=x^2 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-97a455a0afa448587e17185841cef3b2_l3.png "Rendered by QuickLaTeX.com")
Use
. Compare with the “FindRoot” built-in function in Mathematica. -
Compare the convergence of the Newton-Raphson method and the fixed-point iteration method with initial guesses of
 and to find a solution to the following nonlinear system of equations:
and to find a solution to the following nonlinear system of equations:
![\[ \begin{split} x^2=5-y^2\\ y+1=x^2 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d1fd8749287dcb57041128f75e6d5303_l3.png "Rendered by QuickLaTeX.com")
-
Use the Newton-Raphson method to find a solution to the following nonlinear set of equations:
![\[\begin{split} 20x_1^4x_2+3x_2^3=20\\ 20x_1^2x_2^3=1 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-055ac5a8cca6edf17ffbc7af1719efa4_l3.png "Rendered by QuickLaTeX.com")
Use
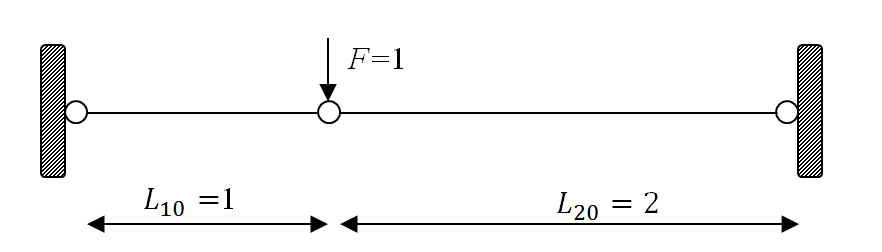
-
The following structural system is composed of two truss elements with unit cross sectional area. The left and right supports are hinged supports. The middle connection where the load is applied is also a hinged connection. Find the displacement at equilibrium of the following structural system. Assume a linear material with
 where
where  is the stress in the bar,
is the stress in the bar,  is the corresponding strain, and
is the corresponding strain, and  is the initial length. Use the Newton-Raphson method.
is the initial length. Use the Newton-Raphson method.
- Solve the following nonlinear system of equations using the Newton-Raphson method and
![\[ \begin{split} x_1-x_2-x_3-0.2=0\\ x_2-x_4-0.2=0\\ x_4+x_5-0.2=0\\ -x_5-x_6+x_7-0.2=0\\ x_3+x_6-0.2=0\\ 20|x_2|x_2-30|x_3|x_3+20|x_4|x_4-20|x_5|x_5+40|x_6|x_6=0\\ 60|x_1|x_1+30|x_3|x_3-40|x_6|x_6-30|x_7|x_7-10=0 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-8465703bde73c16551b511f5b2621e04_l3.png "Rendered by QuickLaTeX.com")
Hint, if
 :
:![\[ \frac{\partial |x_i|x_i}{\partial x_i}=2|x_i| \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d020950b2d54b07c1951163650de5372_l3.png "Rendered by QuickLaTeX.com")