
Introduction to Numerical Analysis: Finding Roots of Equations
Let ![f:[a,b]\rightarrow \mathbb{R}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-602dc0a5221796cd029651364476c9ef_l3.png "Rendered by QuickLaTeX.com") be a function. One of the most basic problems in numerical analysis is to find the value
be a function. One of the most basic problems in numerical analysis is to find the value ![x\in[a,b]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-7bdc9e9b79b72dde0a30288760e0fe60_l3.png "Rendered by QuickLaTeX.com") that would render
that would render  . This value
. This value  is called a root of the equation
is called a root of the equation  . As an example, consider the function
. As an example, consider the function  . Consider the equation . Clearly, there is only one root to this equation which is
. Consider the equation . Clearly, there is only one root to this equation which is  . Alternatively, consider
. Alternatively, consider  defined as
defined as  with
with  . There are two analytical roots for the equation
. There are two analytical roots for the equation  given by
given by
![\[ x=\frac{-b\pm \sqrt{b^2-4ac}}{2a} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ded485af20a81a31cb8b738cc763027b_l3.png "Rendered by QuickLaTeX.com")
In this section we are going to present three classes of methods: graphical, bracketing, and open methods for finding roots of equations.
Graphical Methods
Graphical methods rely on a computational device that calculates the values of the function along an interval at specific steps, and then draws the graph of the function. By visual inspection, the analyst can identify the points at which the function crosses the axis. Graphical methods are very useful for one-dimensional problems, but for multi-dimensional problems it is not possible to visualize a graph of a function of multi-variables.
Example
As an example, consider  . We wish to find the values of (i.e., the roots) that would satisfy the equation for
. We wish to find the values of (i.e., the roots) that would satisfy the equation for ![x\in[-1,1]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a24b651652a6946feb15e6914bad1f3d_l3.png "Rendered by QuickLaTeX.com") . The fastest way is to plot the graph (even Microsoft Excel would serve as an appropriate tool here) and then visually inspect the locations where the graph crosses the axis:
. The fastest way is to plot the graph (even Microsoft Excel would serve as an appropriate tool here) and then visually inspect the locations where the graph crosses the axis:
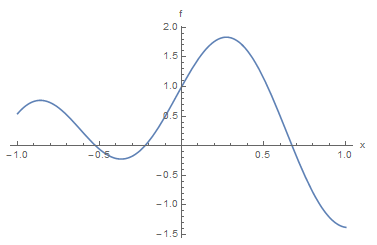
As shown in the above graph, the equation has three roots and just by visual inspection, the roots are around  ,
,  , and
, and  . Of course these estimates are not that accurate for
. Of course these estimates are not that accurate for  ,
,  , and
, and  . Whether these estimates are acceptable or not, depends on the requirements of the problem. We can further zoom in using the software to try and get better estimates:
. Whether these estimates are acceptable or not, depends on the requirements of the problem. We can further zoom in using the software to try and get better estimates:
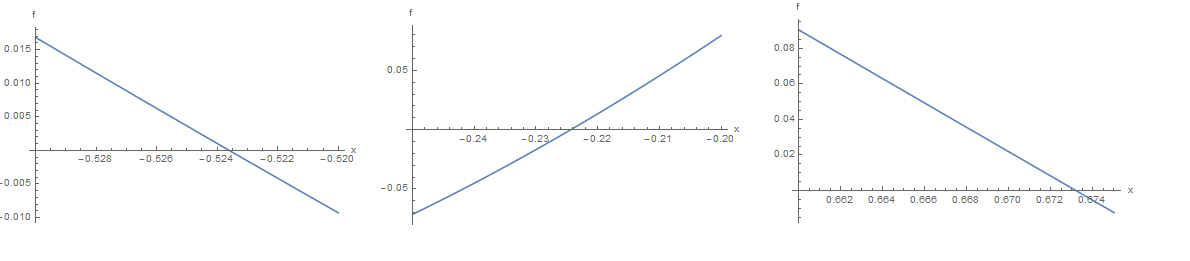
Visual inspection of the zoomed-in graphs provides the following estimates:  ,
,  , and
, and  which are much better estimates since:
which are much better estimates since:  ,
,  , and
, and 
Clear[x]
f = Sin[5 x] + Cos[2 x]
Plot[f, {x, -1, 1}, AxesLabel -> {"x", "f"}]
f /. x -> -0.525
f /. x -> -0.21
f /. x -> 0.675
Plot[f, {x, -0.53, -0.52}, AxesLabel -> {"x", "f"}]
Plot[f, {x, -0.25, -0.2}, AxesLabel -> {"x", "f"}]
Plot[f, {x, 0.66, 0.675}, AxesLabel -> {"x", "f"}]
f /. x -> -0.5235
f /. x -> -0.225
f /. x -> 0.6731
Bracketing Methods
An elementary observation from the previous method is that in most cases, the function changes signs around the roots of an equation. The bracketing methods rely on the intermediate value theorem.
Intermediate Value Theorem
Statement: Let be continuous and  . Then,
. Then, ![\forall y\in[f(a),f(b)]:\exists x\in[a,b]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-2ef5c1b589769d87282b42b3eec6edb2_l3.png "Rendered by QuickLaTeX.com") such that
such that  . The same applies if
. The same applies if  .
.
The proof for the intermediate value theorem relies on the assumption of continuity of the function . Intuitively, because the function is continuous, then for the values of to change from  to
to  it has to pass by every possible value between and . The consequence of the theorem is that if the function is such that
it has to pass by every possible value between and . The consequence of the theorem is that if the function is such that  , then, there is such that . We can proceed to find iteratively using either the bisection method or the false position method.
, then, there is such that . We can proceed to find iteratively using either the bisection method or the false position method.
Bisection Method
In the bisection method, if  , an estimate for the root of the equation can be found as the average of
, an estimate for the root of the equation can be found as the average of  and
and  :
:
![\[ x_i=\frac{a+b}{2} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-7d89040aa746a02dbcd65839fb20872a_l3.png "Rendered by QuickLaTeX.com")
Upon evaluating  , the next iteration would be to set either
, the next iteration would be to set either  or
or  such that for the next iteration the root
such that for the next iteration the root  is between and . The following describes an algorithm for the bisection method given
is between and . The following describes an algorithm for the bisection method given  ,
,  ,
,  , and maximum number of iterations:
, and maximum number of iterations:
Step 1: Evaluate and to ensure that . Otherwise, exit with an error.
Step 2: Calculate the value of the root in iteration  as
as  . Check which of the following applies:
. Check which of the following applies:
- If
 , then the root has been found, the value of the error
, then the root has been found, the value of the error  . Exit.
. Exit. - If
 , then for the next iteration, is bracketed between
, then for the next iteration, is bracketed between  and
and  . The value of
. The value of  .
. - If
 , then for the next iteration, is bracketed between and
, then for the next iteration, is bracketed between and  . The value of .
. The value of .
Step 3: Set  . If reaches the maximum number of iterations or if
. If reaches the maximum number of iterations or if  , then the iterations are stopped. Otherwise, return to step 2 with the new interval
, then the iterations are stopped. Otherwise, return to step 2 with the new interval  and
and  .
.
Example
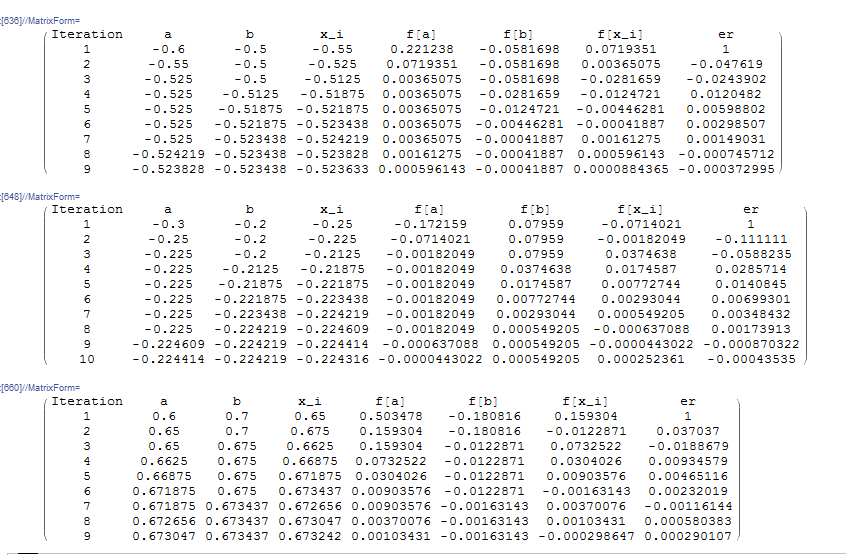
Setting  and applying this process to with
and applying this process to with  and
and  yields the estimate
yields the estimate  after 9 iterations with
after 9 iterations with  as shown below. Similarly, applying this process to with
as shown below. Similarly, applying this process to with  and
and  yields the estimate
yields the estimate  after 10 iterations with
after 10 iterations with  while applying this process to with
while applying this process to with  and
and  yields the estimate
yields the estimate  after 9 iterations with
after 9 iterations with  :
:
Clear[f, x, ErrorTable, ei]
f[x_] := Sin[5 x] + Cos[2 x]
(*The following function returns x_i and the new interval (a,b) along with an error note. The order of the output is {xi,new a, new b, note}*)
bisec2[f_, a_, b_] := (xi = (a + b)/2; Which[
f[a]*f[b] > 0, {xi, a, b, "Root Not Bracketed"},
f[xi] == 0, {xi, a, b, "Root Found"},
f[xi]*f[a] < 0, {xi, a, xi, "Root between a and xi"},
f[xi]*f[b] < 0, {xi, xi, b, "Root between xi and b"}])
(*Problem Setup*)
MaxIter = 20;
eps = 0.0005;
(*First root*)
ErrorTable = {1};
ErrorNoteTable = {};
atable = {-0.6};
btable = {-0.5};
xtable = {};
i = 1;
Stopcode = "NoStopping";
While[And[i <= MaxIter, Stopcode == "NoStopping"],
ri = bisec2[f, atable[[i]], btable[[i]]];
If[ri[[4]] == "Root Not Bracketed", xtable = Append[xtable, ri[[1]]];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
If[ri[[4]] == "Root Found", xtable = Append[xtable, ri[[1]]]; ErrorTable = Append[ErrorTable, 0];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
atable = Append[atable, ri[[2]]];
btable = Append[btable, ri[[3]]];
xtable = Append[xtable, ri[[1]]];
ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]];
If[i != 1,
ei = (xtable[[i]] - xtable[[i - 1]])/xtable[[i]];
ErrorTable = Append[ErrorTable, ei]];
If[Abs[ErrorTable[[i]]] > eps, Stopcode = "NoStopping", Stopcode = "Stop"];
i++]
Title = {"Iteration", "a", "b", "x_i", "f[a]", "f[b]", "f[x_i]", "er", "ErrorNote"};
T2 = Table[{i, atable[[i]], btable[[i]], xtable[[i]], f[atable[[i]]], f[btable[[i]]], f[xtable[[i]]], ErrorTable[[i]], ErrorNoteTable[[i]]}, {i, Length[xtable]}];
T2 = Prepend[T2, Title];
T2 // MatrixForm
(*Second Root*)
ErrorTable = {1};
ErrorNoteTable = {};
atable = {-0.3};
btable = {-0.2};
xtable = {};
i = 1;
Stopcode = "NoStopping";
While[And[i <= MaxIter, Stopcode == "NoStopping"],
ri = bisec2[f, atable[[i]], btable[[i]]];
If[ri[[4]] == "Root Not Bracketed", xtable = Append[xtable, ri[[1]]];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
If[ri[[4]] == "Root Found", xtable = Append[xtable, ri[[1]]]; ErrorTable = Append[ErrorTable, 0];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
atable = Append[atable, ri[[2]]];
btable = Append[btable, ri[[3]]];
xtable = Append[xtable, ri[[1]]];
ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]];
If[i != 1,
ei = (xtable[[i]] - xtable[[i - 1]])/xtable[[i]];
ErrorTable = Append[ErrorTable, ei]];
If[Abs[ErrorTable[[i]]] > eps, Stopcode = "NoStopping", Stopcode = "Stop"];
i++]
Title = {"Iteration", "a", "b", "x_i", "f[a]", "f[b]", "f[x_i]", "er", "ErrorNote"};
T2 = Table[{i, atable[[i]], btable[[i]], xtable[[i]], f[atable[[i]]], f[btable[[i]]], f[xtable[[i]]], ErrorTable[[i]], ErrorNoteTable[[i]]}, {i, Length[xtable]}];
T2 = Prepend[T2, Title];
T2 // MatrixForm
(*Third Root*)
ErrorTable = {1};
ErrorNoteTable = {};
atable = {0.6};
btable = {0.7};
xtable = {};
i = 1;
Stopcode = "NoStopping";
While[And[i <= MaxIter, Stopcode == "NoStopping"],
ri = bisec2[f, atable[[i]], btable[[i]]];
If[ri[[4]] == "Root Not Bracketed", xtable = Append[xtable, ri[[1]]];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
If[ri[[4]] == "Root Found", xtable = Append[xtable, ri[[1]]]; ErrorTable = Append[ErrorTable, 0];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
atable = Append[atable, ri[[2]]];
btable = Append[btable, ri[[3]]];
xtable = Append[xtable, ri[[1]]];
ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]];
If[i != 1,
ei = (xtable[[i]] - xtable[[i - 1]])/xtable[[i]];
ErrorTable = Append[ErrorTable, ei]];
If[Abs[ErrorTable[[i]]] > eps, Stopcode = "NoStopping", Stopcode = "Stop"];
i++]
Title = {"Iteration", "a", "b", "x_i", "f[a]", "f[b]", "f[x_i]", "er", "ErrorNote"};
T2 = Table[{i, atable[[i]], btable[[i]], xtable[[i]], f[atable[[i]]], f[btable[[i]]], f[xtable[[i]]], ErrorTable[[i]], ErrorNoteTable[[i]]}, {i, Length[xtable]}];
T2 = Prepend[T2, Title];
T2 // MatrixForm
The following code can be used to implement the bisection method in MATLAB. For the sake of demonstration, it finds the roots of the function in above example. The example function is defined in another file
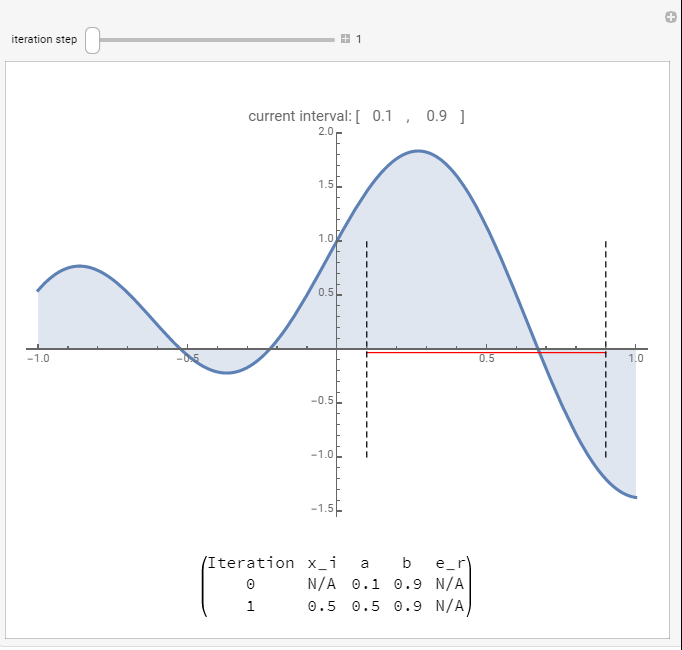
The following tool illustrates this process for  and
and  . Use the slider to view the process after each iteration. In the first iteration, the interval
. Use the slider to view the process after each iteration. In the first iteration, the interval ![[a,b]=[0.1,0.9]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-793e6eb87ea42d86b9b1c5ba6eb99747_l3.png "Rendered by QuickLaTeX.com") . , so,
. , so,  . In the second iteration, the interval becomes
. In the second iteration, the interval becomes ![[0.5,0.9]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-464a88623c8464249845a5e17ce0a4ae_l3.png "Rendered by QuickLaTeX.com") and the new estimate
and the new estimate  . The relative approximate error in the estimate
. The relative approximate error in the estimate  . You can view the process to see how it converges after 12 iterations.
. You can view the process to see how it converges after 12 iterations.
Error Estimation
If  is the true value of the root and
is the true value of the root and  is the estimate, then, the number of iterations
is the estimate, then, the number of iterations  needed to ensure that the absolute value of the error
needed to ensure that the absolute value of the error  is less than or equal to a certain value can be easily obtained. Let
is less than or equal to a certain value can be easily obtained. Let  be the length of the original interval used. The first estimate
be the length of the original interval used. The first estimate  and so, in the next iteration, the interval where the root is contained has a length of
and so, in the next iteration, the interval where the root is contained has a length of  . As the process evolves, the interval for the iteration number has a length of
. As the process evolves, the interval for the iteration number has a length of  . Since the true value exists in an interval of length , the absolute value of the error is such that:
. Since the true value exists in an interval of length , the absolute value of the error is such that:
![\[ |E|\leq \frac{L}{2^n} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-7a6c2d031ff49a67607ce637e7eca7c6_l3.png "Rendered by QuickLaTeX.com")
Therefore, for a desired estimate of the absolute value of the error, say  , the number of iterations required is:
, the number of iterations required is:
![\[ \frac{L}{2^n}=E_{max}\Rightarrow n=\frac{\ln{\frac{L}{E_{max}}}}{\ln{2}} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-129b1dd584fade2a7f70e2e4589a8918_l3.png "Rendered by QuickLaTeX.com")
Example
As an example, consider  , if we wish to find the root of the equation in the interval
, if we wish to find the root of the equation in the interval ![[1,2]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9ba08d4c7c78d446c6d78686996572a8_l3.png "Rendered by QuickLaTeX.com") with an absolute error less than or equal to 0.004, the number of iterations required is 8:
with an absolute error less than or equal to 0.004, the number of iterations required is 8:
![\[ n=\frac{\ln{\frac{1}{0.004}}}{\ln{2}}= 7.966 \approx 8 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1450cb175686c5c014f3ea61b8c4aa8e_l3.png "Rendered by QuickLaTeX.com")
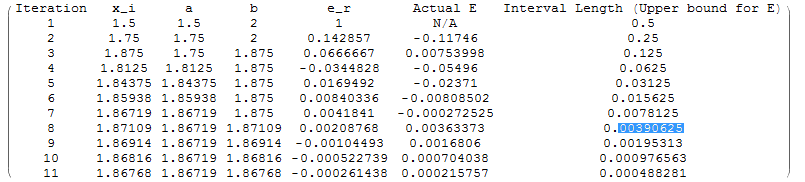
The actual root with 10 significant digits is  .
.
Using the process above, after the first iteration,  and so, the root lies between
and so, the root lies between  and
and  . So, the length of the interval is equal to 0.5 and the error in the estimate is less than 0.5. The length of the interval after iteration 8 is equal to 0.0039 and so the error in the estimate is less than 0.0039. It should be noted however that the actual error was less than this upper bound after the seventh iteration.
. So, the length of the interval is equal to 0.5 and the error in the estimate is less than 0.5. The length of the interval after iteration 8 is equal to 0.0039 and so the error in the estimate is less than 0.0039. It should be noted however that the actual error was less than this upper bound after the seventh iteration.
Clear[f, x, tt, ErrorTable, nn];
f[x_] := x^3 + x^2 - 10;
bisec[f_, a_, b_] := If[f[a] f[b] <= 0, If[f[(a + b)/2] f[a] <= 0, {(a + b)/2, a, (a + b)/2}, If[f[(a + b)/2] f[b] <= 0, {(a + b)/2, (a + b)/2, b}]], "Error, root is not bracketed"];
(*Exact Solution*)
t = Solve[x^3 + x^2 - 10 == 0, x]
Vt = N[x /. t[[1]], 10]
(*Problem Setup*)
MaxIter = 20;
eps = 0.0005;
(*First root*)
x = {bisec[f, 1., 2]};
ErrorTable = {1};
ErrorTable2 = {"N/A"};
IntervalLength = {0.5};
i = 2;
While[And[i <= MaxIter, Abs[ErrorTable[[i - 1]]] > eps],
ri = bisec[f, x[[i - 1, 2]], x[[i - 1, 3]]];
If[ri=="Error, root is not bracketed",ErrorTable[[1]]="Error, root is not bracketed";Break[]];
x = Append[x, ri]; ei = (x[[i, 1]] - x[[i - 1, 1]])/x[[i, 1]]; e2i = x[[i, 1]] - Vt; ErrorTable = Append[ErrorTable, ei]; IntervalLength = Append[IntervalLength, (x[[i - 1, 3]] - x[[i - 1, 2]])/2]; ErrorTable2 = Append[ErrorTable2, e2i]; i++]
x // MatrixForm
ErrorTable // MatrixForm
Title = {"Iteration", "x_i", "a", "b", "e_r", "Actual E", "Interval Length (Upper bound for E)"};
T2 = Table[{i, x[[i, 1]], x[[i, 2]], x[[i, 3]], ErrorTable[[i]], ErrorTable2[[i]], IntervalLength[[i]]}, {i, 1, Length[x]}];
T2 = Prepend[T2, Title];
T2 // MatrixForm
The procedure for solving the above example in MATLAB is available in the following files. The polynomial function is defined in a separate file.
False Position Method
In the false position method, the new estimate at iteration is obtained by considering the linear function passing through the two points  and
and  . The point of intersection of this line with the axis can be obtained using one of the following formulas:
. The point of intersection of this line with the axis can be obtained using one of the following formulas:
![\[ x_i=a-f(a)\frac{(b-a)}{f(b)-f(a)}=b-f(b)\frac{(b-a)}{f(b)-f(a)}=\frac{af(b)-bf(a)}{f(b)-f(a)} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-0e5e8e121f309d6d7a5068dfd9d71be9_l3.png "Rendered by QuickLaTeX.com")
Upon evaluating , the next iteration would be to set either or such that for the next iteration the root is between and . The following describes an algorithm for the false position method method given , , “varepsilon_2”, and maximum number of iterations:
Step 1: Evaluate and to ensure that . Otherwise exit with an error.
Step 2: Calculate the value of the root in iteration as  . Check which of the following applies:
. Check which of the following applies:
- If , then the root has been found, the value of the error . Exit.
- If , then for the next iteration, is bracketed between and . The value of .
- If , then for the next iteration, is bracketed between and . The value of .
Step 3: If reaches the maximum number of iterations or if , then the iterations are stopped. Otherwise, return to step 2.
Example
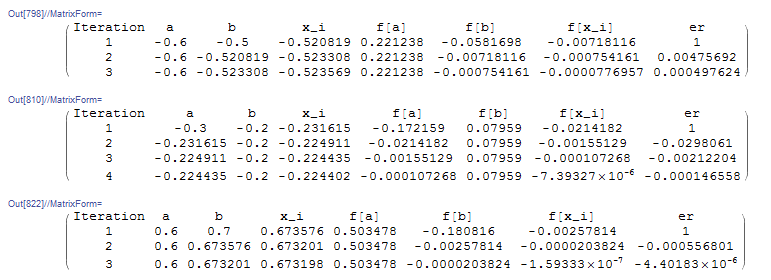
Setting and applying this process to with and yields the estimate  after 3 iterations with
after 3 iterations with  as shown below. Similarly, applying this process to with and yields the estimate
as shown below. Similarly, applying this process to with and yields the estimate  after 4 iterations with
after 4 iterations with  while applying this process to with and yields the estimate
while applying this process to with and yields the estimate  after 3 iterations with
after 3 iterations with  :
:
Clear[f, x, ErrorTable, ei]
f[x_] := Sin[5 x] + Cos[2 x]
(*The following function returns x_i and the new interval (a,b) along with an error note. The order of the output is {xi,new a, new b, note}*)
falseposition[f_, a_, b_] := (xi = (a*f[b]-b*f[a])/(f[b]-f[a]); Which[
f[a]*f[b] > 0, {xi, a, b, "Root Not Bracketed"},
f[xi] == 0, {xi, a, b, "Root Found"},
f[xi]*f[a] < 0, {xi, a, xi, "Root between a and xi"},
f[xi]*f[b] < 0, {xi, xi, b, "Root between xi and b"}])
(*Problem Setup*)
MaxIter = 20;
eps = 0.0005;
(*First root*)
ErrorTable = {1};
ErrorNoteTable = {};
atable = {-0.6};
btable = {-0.5};
xtable = {};
i = 1;
Stopcode = "NoStopping";
While[And[i <= MaxIter, Stopcode == "NoStopping"],
ri = falseposition[f, atable[[i]], btable[[i]]];
If[ri[[4]] == "Root Not Bracketed", xtable = Append[xtable, ri[[1]]];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
If[ri[[4]] == "Root Found", xtable = Append[xtable, ri[[1]]]; ErrorTable = Append[ErrorTable, 0];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
atable = Append[atable, ri[[2]]];
btable = Append[btable, ri[[3]]];
xtable = Append[xtable, ri[[1]]];
ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]];
If[i != 1,
ei = (xtable[[i]] - xtable[[i - 1]])/xtable[[i]];
ErrorTable = Append[ErrorTable, ei]];
If[Abs[ErrorTable[[i]]] > eps, Stopcode = "NoStopping", Stopcode = "Stop"];
i++]
Title = {"Iteration", "a", "b", "x_i", "f[a]", "f[b]", "f[x_i]", "er", "ErrorNote"};
T2 = Table[{i, atable[[i]], btable[[i]], xtable[[i]], f[atable[[i]]], f[btable[[i]]], f[xtable[[i]]], ErrorTable[[i]], ErrorNoteTable[[i]]}, {i, Length[xtable]}];
T2 = Prepend[T2, Title];
T2 // MatrixForm
(*Second Root*)
ErrorTable = {1};
ErrorNoteTable = {};
atable = {-0.3};
btable = {-0.2};
xtable = {};
i = 1;
Stopcode = "NoStopping";
While[And[i <= MaxIter, Stopcode == "NoStopping"],
ri = falseposition[f, atable[[i]], btable[[i]]];
If[ri[[4]] == "Root Not Bracketed", xtable = Append[xtable, ri[[1]]];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
If[ri[[4]] == "Root Found", xtable = Append[xtable, ri[[1]]]; ErrorTable = Append[ErrorTable, 0];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
atable = Append[atable, ri[[2]]];
btable = Append[btable, ri[[3]]];
xtable = Append[xtable, ri[[1]]];
ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]];
If[i != 1,
ei = (xtable[[i]] - xtable[[i - 1]])/xtable[[i]];
ErrorTable = Append[ErrorTable, ei]];
If[Abs[ErrorTable[[i]]] > eps, Stopcode = "NoStopping", Stopcode = "Stop"];
i++]
Title = {"Iteration", "a", "b", "x_i", "f[a]", "f[b]", "f[x_i]", "er", "ErrorNote"};
T2 = Table[{i, atable[[i]], btable[[i]], xtable[[i]], f[atable[[i]]], f[btable[[i]]], f[xtable[[i]]], ErrorTable[[i]], ErrorNoteTable[[i]]}, {i, Length[xtable]}];
T2 = Prepend[T2, Title];
T2 // MatrixForm
(*Third Root*)
ErrorTable = {1};
ErrorNoteTable = {};
atable = {0.6};
btable = {0.7};
xtable = {};
i = 1;
Stopcode = "NoStopping";
While[And[i <= MaxIter, Stopcode == "NoStopping"],
ri = falseposition[f, atable[[i]], btable[[i]]];
If[ri[[4]] == "Root Not Bracketed", xtable = Append[xtable, ri[[1]]];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
If[ri[[4]] == "Root Found", xtable = Append[xtable, ri[[1]]]; ErrorTable = Append[ErrorTable, 0];ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]]; Break[]];
atable = Append[atable, ri[[2]]];
btable = Append[btable, ri[[3]]];
xtable = Append[xtable, ri[[1]]];
ErrorNoteTable = Append[ErrorNoteTable, ri[[4]]];
If[i != 1,
ei = (xtable[[i]] - xtable[[i - 1]])/xtable[[i]];
ErrorTable = Append[ErrorTable, ei]];
If[Abs[ErrorTable[[i]]] > eps, Stopcode = "NoStopping", Stopcode = "Stop"];
i++]
Title = {"Iteration", "a", "b", "x_i", "f[a]", "f[b]", "f[x_i]", "er", "ErrorNote"};
T2 = Table[{i, atable[[i]], btable[[i]], xtable[[i]], f[atable[[i]]], f[btable[[i]]], f[xtable[[i]]], ErrorTable[[i]], ErrorNoteTable[[i]]}, {i, Length[xtable]}];
T2 = Prepend[T2, Title];
T2 // MatrixForm
The procedure for implementing the false position root finding algorithm in MATLAB is available in the following files. The example function is defined in a separate file.
The following tool illustrates this process for and . Use the slider to view the process after each iteration. In the first iteration, the interval . , so,  . In the second iteration, the interval becomes
. In the second iteration, the interval becomes ![[0.538249,0.9]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-beebe659e88f0f5aa2d58430b9d21903_l3.png "Rendered by QuickLaTeX.com") and the new estimate
and the new estimate  . The relative approximate error in the estimate
. The relative approximate error in the estimate  . You can view the process to see how it converges after very few iterations.
. You can view the process to see how it converges after very few iterations.
Open Methods
Open methods do not rely on having the root squeezed between two values, but rather rely on an initial guess and then apply an iterative process to get better estimates for the root. Open methods are usually faster in convergence if they converge, but they don’t always converge. For multi-dimensions, i.e., for solving multiple nonlinear equations, open methods are easier to implement than bracketing methods which cannot be easily extended to multi-dimensions.
Fixed-Point Iteration Method
Let  . A fixed point of
. A fixed point of  is defined as
is defined as  such that
such that  . If
. If  , then a fixed point of is the intersection of the graphs of the two functions
, then a fixed point of is the intersection of the graphs of the two functions  and
and  .
.
The fixed-point iteration method relies on replacing the expression with the expression . Then, an initial guess for the root  is assumed and input as an argument for the function . The output
is assumed and input as an argument for the function . The output  is then the estimate
is then the estimate  . The process is then iterated until the output
. The process is then iterated until the output  . The following is the algorithm for the fixed-point iteration method. Assuming
. The following is the algorithm for the fixed-point iteration method. Assuming  , , and maximum number of iterations
, , and maximum number of iterations  :
:
Set  , and calculate
, and calculate  and compare with . If
and compare with . If  or if
or if  , then stop the procedure, otherwise, repeat.
, then stop the procedure, otherwise, repeat.
The Babylonian method for finding roots described in the introduction section is a prime example of the use of this method. If we seek to find the solution for the equation  or
or  , then a fixed-point iteration scheme can be implemented by writing this equation in the form:
, then a fixed-point iteration scheme can be implemented by writing this equation in the form:
![\[ x=\frac{x+\frac{s}{x}}{2} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-8396bcc8c95ef3aad7d3dac59f51812a_l3.png "Rendered by QuickLaTeX.com")
Example
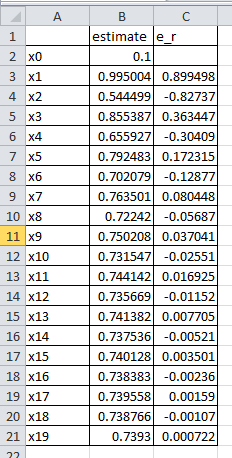
Consider the function  . We wish to find the root of the equation , i.e.,
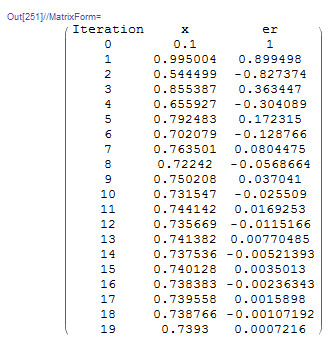
. We wish to find the root of the equation , i.e.,  . The expression can be rearranged to the fixed-point iteration form
. The expression can be rearranged to the fixed-point iteration form  and an initial guess
and an initial guess  can be used. The tolerance is set to 0.001. The following is the Microsoft Excel table showing that the tolerance is achieved after 19 iterations:
can be used. The tolerance is set to 0.001. The following is the Microsoft Excel table showing that the tolerance is achieved after 19 iterations:
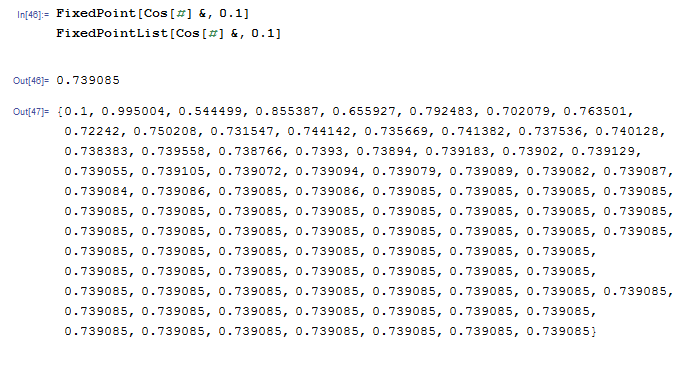
Mathematica has a built-in algorithm for the fixed-point iteration method. The function “FixedPoint[f,Expr,n]” applies the fixed-point iteration method  with the initial guess being “Expr” with a maximum number of iterations “n”. As well, the function “FixedPointList[f,Expr,n]” returns the list of applying the function “n” times. If “n” is omitted, then the software applies the fixed-point iteration method until convergence is achieved. Here is a snapshot of the code and the output for the fixed-point iteration . The software finds the solution
with the initial guess being “Expr” with a maximum number of iterations “n”. As well, the function “FixedPointList[f,Expr,n]” returns the list of applying the function “n” times. If “n” is omitted, then the software applies the fixed-point iteration method until convergence is achieved. Here is a snapshot of the code and the output for the fixed-point iteration . The software finds the solution  . Compare the list below with the Microsoft Excel sheet above.
. Compare the list below with the Microsoft Excel sheet above.
Alternatively, simple code can be written in Mathematica with the following output
View Mathematica Code
x = {0.1};
er = {1};
es = 0.001;
MaxIter = 100;
i = 1;
While[And[i <= MaxIter, Abs[er[[i]]] > es], xnew = Cos[x[[i]]]; x = Append[x, xnew]; ernew = (xnew - x[[i]])/xnew; er = Append[er, ernew]; i++];
T = Length[x];
SolutionTable = Table[{i - 1, x[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
T // MatrixForm
The following MATLAB code runs the fixed-point iteration method to find the root of a function with initial guess . The value of the estimate and approximate relative error at each iteration is displayed in the command window. Additionally, two plots are produced to visualize how the iterations and the errors progress. Your function should be written in the form  . Then call the fixed point iteration function with fixedpointfun2(@(x) g(x), x0). For example, try fixedpointfun2(@(x) cos(x), 0.1)
. Then call the fixed point iteration function with fixedpointfun2(@(x) g(x), x0). For example, try fixedpointfun2(@(x) cos(x), 0.1)
Convergence
The fixed-point iteration method converges easily if in the region of interest we have  . Otherwise, it does not converge. Here is an example where the fixed-point iteration method fails to converge.
. Otherwise, it does not converge. Here is an example where the fixed-point iteration method fails to converge.
Example
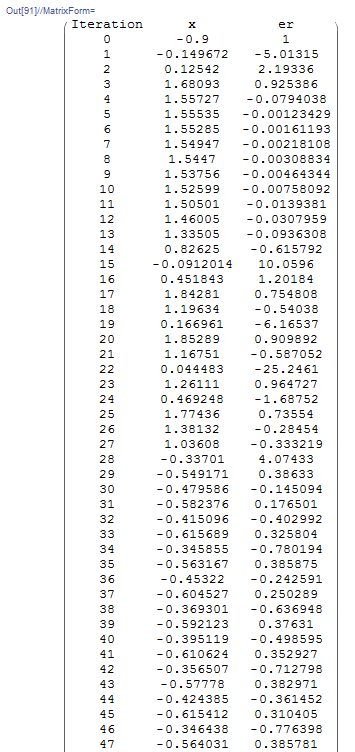
Consider the function . To find the root of the equation , the expression can be converted into the fixed-point iteration form as:
 . Implementing the fixed-point iteration procedure shows that this expression almost never converges but oscillates:
. Implementing the fixed-point iteration procedure shows that this expression almost never converges but oscillates:
Clear[x, g]
x = {-0.9};
er = {1};
es = 0.001;
MaxIter = 100;
i = 1;
g[x_] := (Sin[5 x] + Cos[2 x]) + x
While[And[i <= MaxIter, Abs[er[[i]]] > es],xnew = g[x[[i]]]; x = Append[x, xnew]; ernew = (xnew - x[[i]])/xnew;er = Append[er, ernew]; i++];
T = Length[x];
SolutionTable = Table[{i - 1, x[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
T // MatrixForm
The following is the output table showing the first 45 iterations. The value of the error oscillates and never decreases:
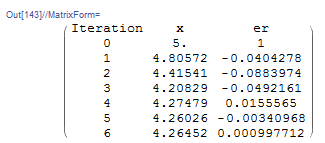
The expression can be converted to different forms . For example, assuming  :
:
![\[ 0=\sin{5x}+\cos{2x}\Rightarrow 0=\frac{\sin{5x}+\cos{2x}}{x}\Rightarrow x=\frac{\sin{5x}+\cos{2x}}{x}+x \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-98c3c88be9eb0fd60478c8bb09ee90f5_l3.png "Rendered by QuickLaTeX.com")
If this expression is used, the fixed-point iteration method does converge depending on the choice of . For example, setting  gives the estimate for the root
gives the estimate for the root  with the required accuracy:
with the required accuracy:
Clear[x, g]
x = {5.};
er = {1};
es = 0.001;
MaxIter = 100;
i = 1;
g[x_] := (Sin[5 x] + Cos[2 x])/x + x
While[And[i <= MaxIter, Abs[er[[i]]] > es], xnew = g[x[[i]]]; x = Append[x, xnew]; ernew = (xnew - x[[i]])/xnew; er = Append[er, ernew]; i++];
T = Length[x];
SolutionTable = Table[{i - 1, x[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
T // MatrixForm
Obviously, unlike the bracketing methods, this open method cannot find a root in a specific interval. The root is a function of the initial guess and the form , but the user has no other way of forcing the root to be within a specific interval. It is very difficult, for example, to use the fixed-point iteration method to find the roots of the expression  in the interval
in the interval ![[-1,1]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-4a7430a5619e08a23c430423c1376967_l3.png "Rendered by QuickLaTeX.com") .
.
Analysis of Convergence of the Fixed-Point Method
The objective of the fixed-point iteration method is to find the true value that satisfies  . In each iteration we have the estimate
. In each iteration we have the estimate  . Using the mean value theorem, we can write the following expression:
. Using the mean value theorem, we can write the following expression:
![\[ g(x_i)=g(V_t)+g'(\xi)(x_i-V_t) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ba713046a4d0c2e8541171c9dfbae7e5_l3.png "Rendered by QuickLaTeX.com")
for some  in the interval between and the true value . Replacing
in the interval between and the true value . Replacing  and
and  in the above expression yields:
in the above expression yields:
![\[ x_{i+1}=V_t+g'(\xi)(x_i-V_t)\Rightarrow x_{i+1}-V_t=g'(\xi)(x_i-V_t) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e7bebc3f7bcc627a429e632d7f9339df_l3.png "Rendered by QuickLaTeX.com")
The error after iteration  is equal to
is equal to  while that after iteration is equal to
while that after iteration is equal to  . Therefore, the above expression yields:
. Therefore, the above expression yields:
![\[ E_{i+1}=g'(\xi)E_i \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-441dae38b0f8789e4e0df4a640baa964_l3.png "Rendered by QuickLaTeX.com")
For the error to reduce after each iteration, the first derivative of , namely  , should be bounded by 1 in the region of interest (around the required root):
, should be bounded by 1 in the region of interest (around the required root):
![\[ |g'(\xi)|< 1 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-fc9766fc84d6dcbefb225d1622906659_l3.png "Rendered by QuickLaTeX.com")
We can now try to understand why, in the previous example, the expression  does not converge. When we plot and
does not converge. When we plot and  we see that oscillates rapidly with values higher than 1:
we see that oscillates rapidly with values higher than 1:
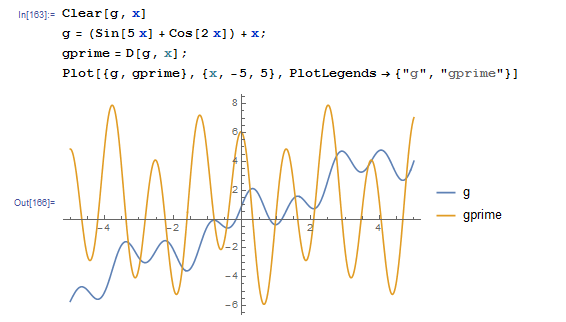
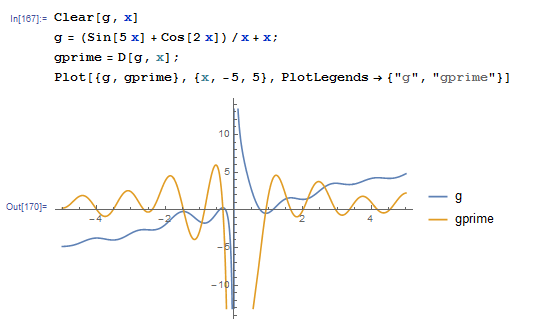
On the other hand, the expression  converges for roots that are away from zero. When we plot and we see that the oscillations in decrease when is away from zero and is bounded by 1 in some regions:
converges for roots that are away from zero. When we plot and we see that the oscillations in decrease when is away from zero and is bounded by 1 in some regions:
Example
In this example, we will visualize the example of finding the root of the expression  . There are three different forms for the fixed-point iteration scheme:
. There are three different forms for the fixed-point iteration scheme:
![\[\begin{split} x&=g_1(x)=\frac{10}{x^3-1}\\ x&=g_2(x)=(x+10)^{1/4}\\ x&=g_3(x)=\frac{(x+10)^{1/2}}{x} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f0ad81effc087eae88fc0e17dd551ffa_l3.png "Rendered by QuickLaTeX.com")
To visualize the convergence, notice that if we plot the separate graphs of the function and the function , then, the root is the point of intersection when . For  , the slope
, the slope  is not bounded by 1 and so, the scheme diverges no matter what is. Here we start with
is not bounded by 1 and so, the scheme diverges no matter what is. Here we start with  :
:
For  , the slope
, the slope  is bounded by 1 and so, the scheme converges really fast no matter what is. Here we start with
is bounded by 1 and so, the scheme converges really fast no matter what is. Here we start with  :
:
For  , the slope
, the slope  is bounded by 1 and so, the scheme converges but slowly. Here we start with :
is bounded by 1 and so, the scheme converges but slowly. Here we start with :
The following is the Mathematica code used to generate one of the tools above:
View Mathematica Code
Manipulate[
x = {5.};
er = {1};
es = 0.001;
MaxIter = 20;
i = 1;
g[x_] := (x + 10)^(1/4);
While[And[i <= MaxIter, Abs[er[[i]]] > es],xnew = g[x[[i]]]; x = Append[x, xnew]; ernew = (xnew - x[[i]])/xnew;er = Append[er, ernew]; i++];
T1 = Length[x];
SolutionTable = Table[{i - 1, x[[i]], er[[i]]}, {i, 1, T1}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
LineTable1 = Table[{{T[[i, 2]], T[[i, 2]]}, {T[[i, 2]], g[T[[i, 2]]]}}, {i, 2, n}];
LineTable2 = Table[{{T[[i + 1, 2]], T[[i + 1, 2]]}, {T[[i, 2]], g[T[[i, 2]]]}}, {i, 2, n - 1}];
Grid[{{Plot[{x, g[x]}, {x, 0, 5}, PlotLegends -> {"x", "g3(x)"},ImageSize -> Medium, Epilog -> {Dashed, Line[LineTable1], Line[LineTable2]}]}, {Row[{"Iteration=", n - 2, " x_n=", T[[n, 2]], " g(x_n)=", g[T[[n, 2]]]}]}}], {n, 2, Length[T], 1}]
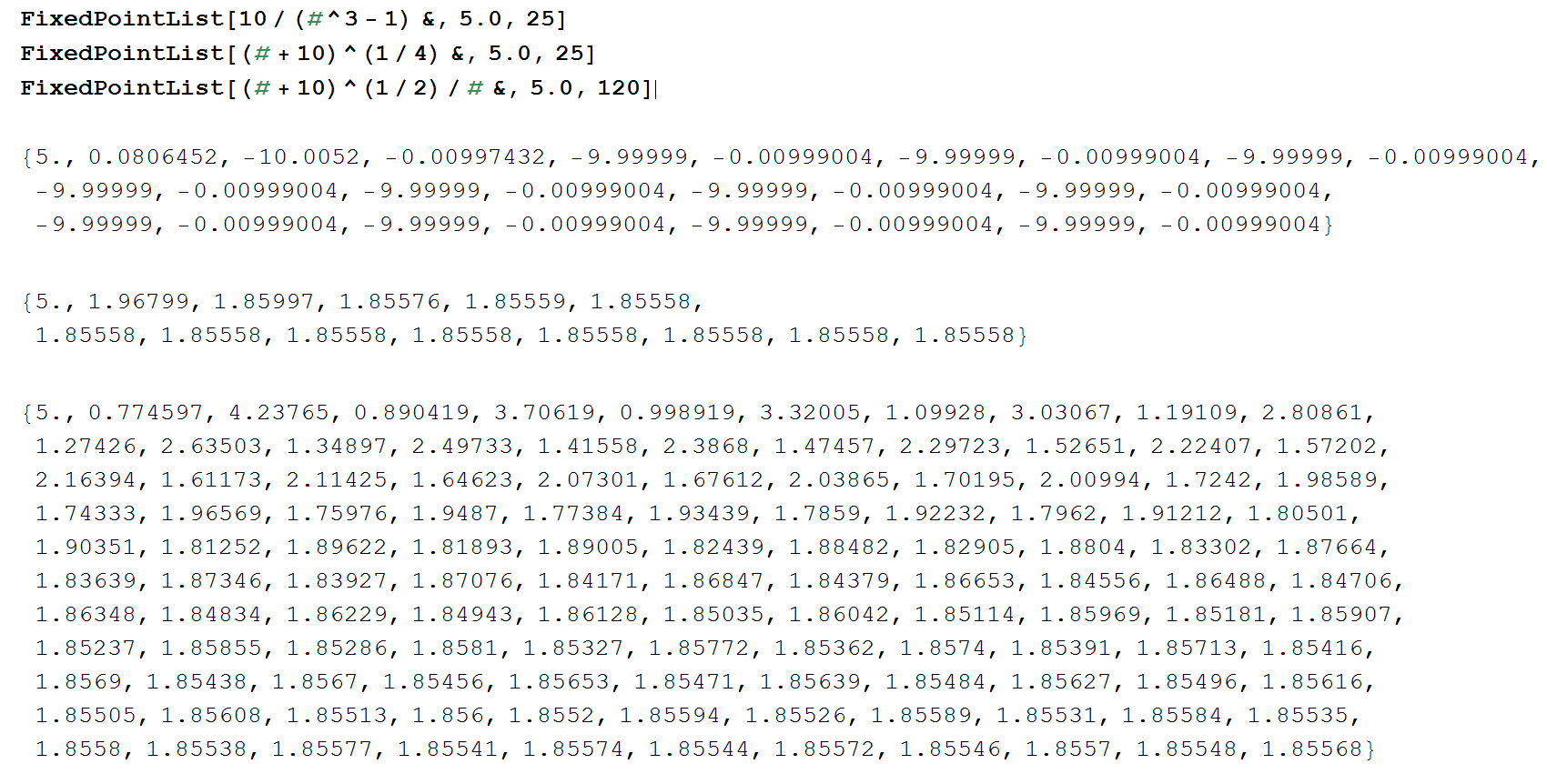
The following shows the output if we use the built-in fixed-point iteration function for each of  ,
,  , and
, and  . oscillates and so, it will never converge. converges really fast (3 to 4 iterations). converges really slow, taking up to 120 iterations to converge.
. oscillates and so, it will never converge. converges really fast (3 to 4 iterations). converges really slow, taking up to 120 iterations to converge.
Newton-Raphson Method
The Newton-Raphson method is one of the most used methods of all root-finding methods. The reason for its success is that it converges very fast in most cases. In addition, it can be extended quite easily to multi-variable equations. To find the root of the equation  , the Newton-Raphson method depends on the Taylor Series Expansion of the function around the estimate to find a better estimate :
, the Newton-Raphson method depends on the Taylor Series Expansion of the function around the estimate to find a better estimate :
![\[ f(x_{i+1})=f(x_i)+f'(x_i)(x_{i+1}-x_i)+\mathcal O (h^2) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-465a59b53d1d675557b89c2d73ba00bb_l3.png "Rendered by QuickLaTeX.com")
where is the estimate of the root after iteration and is the estimate at iteration . Assuming  and rearranging:
and rearranging:
![\[ x_{i+1}\approx x_i-\frac{f(x_i)}{f'(x_i)} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-45f1245669c72882ca47f5c4bfaf9ae8_l3.png "Rendered by QuickLaTeX.com")
The procedure is as follows. Setting an initial guess , tolerance , and maximum number of iterations :
At iteration , calculate  and
and  . If or if
. If or if  , stop the procedure. Otherwise repeat.
, stop the procedure. Otherwise repeat.
Note: unlike the previous methods, the Newton-Raphson method relies on calculating the first derivative of the function . This makes the procedure very fast, however, it has two disadvantages. The first is that this procedure doesn’t work if the function is not differentiable. Second, the inverse  can be slow to calculate when dealing with multi-variable equations.
can be slow to calculate when dealing with multi-variable equations.
Example
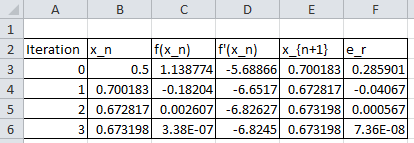
As an example, let’s consider the function . The derivative of is  . Setting the maximum number of iterations
. Setting the maximum number of iterations  , ,
, ,  , the following is the Microsoft Excel table produced:
, the following is the Microsoft Excel table produced:
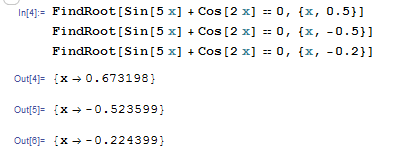
Mathematica has a built-in algorithm for the Newton-Raphson method. The function “FindRoot[lhs==rhs,{x,x0}]” applies the Newton-Raphson method with the initial guess being “x0”. The following is a screenshot of the input and output of the built-in function evaluating the roots based on three initial guesses.
Alternatively, a Mathematica code can be written to implement the Newton-Raphson method with the following output for three different initial guesses:

View Mathematica Code
Clear[x]
f[x_] := Sin[5 x] + Cos[2 x]
fp = D[f[x], x]
xtable = {-0.25};
er = {1};
es = 0.0005;
MaxIter = 100;
i = 1;
While[And[i <= MaxIter, Abs[er[[i]]] > es], xnew = xtable[[i]] - (f[xtable[[i]]]/fp /. x -> xtable[[i]]); xtable = Append[xtable, xnew]; ernew = (xnew - xtable[[i]])/xnew; er = Append[er, ernew]; i++];
T = Length[xtable];
SolutionTable = Table[{i - 1, xtable[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
T // MatrixForm
The following MATLAB code runs the Newton-Raphson method to find the root of a function with derivative  and initial guess . The value of the estimate and approximate relative error at each iteration is displayed in the command window. Additionally, two plots are produced to visualize how the iterations and the errors progress. You need to pass the function f(x) and its derivative df(x) to the newton-raphson method along with the initial guess as newtonraphson(@(x) f(x), @(x) df(x), x0). For example, try newtonraphson(@(x) sin(5.*x)+cos(2.*x), @(x) 5.*cos(5.*x)-2.*sin(2.*x),0.4)
and initial guess . The value of the estimate and approximate relative error at each iteration is displayed in the command window. Additionally, two plots are produced to visualize how the iterations and the errors progress. You need to pass the function f(x) and its derivative df(x) to the newton-raphson method along with the initial guess as newtonraphson(@(x) f(x), @(x) df(x), x0). For example, try newtonraphson(@(x) sin(5.*x)+cos(2.*x), @(x) 5.*cos(5.*x)-2.*sin(2.*x),0.4)
Analysis of Convergence of the Newton-Raphson Method
The error in the Newton-Raphson Method can be roughly estimated as follows. The estimate is related to the previous estimate using the equation:
![\[ x_{i+1}=x_i-\frac{f(x_i)}{f'(x_i)}\Rightarrow 0=f(x_i)+f'(x_i)(x_{i+1}-x_i) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a34a087de7a0e2214fb55cbd90c133b4_l3.png "Rendered by QuickLaTeX.com")
Additionally, using Taylor’s theorem, and if  is the true root with we have:
is the true root with we have:
![\[ f(x_t)=0=f(x_i)+f'(x_i)(x_t-x_i)+\frac{f''(\xi)}{2!}{(x_t-x_i)^2} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e3e01d6393ef501eebb9194126783bd8_l3.png "Rendered by QuickLaTeX.com")
for some in the interval between and . Subtracting the above two equations yields:
![\[ 0=f'(x_i)(x_t-x_{i+1})+\frac{f''(\xi)}{2!}{(x_t-x_i)^2} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5753c49f1003047ba2ebe7746e564358_l3.png "Rendered by QuickLaTeX.com")
 and
and  then:
then: (1) 
If the method is converging, we have  and
and  therefore:
therefore:
![\[ E_{i+1}\propto E_i^2 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-dc4fcec3bfcf3ef509dc5d48766264e4_l3.png "Rendered by QuickLaTeX.com")
Therefore, the error is squared after each iteration, i.e., the number of correct decimal places approximately doubles with each iteration. This behaviour is called quadratic convergence. Look at the tables in the Newton-Raphson example above and compare the relative error after each step!
The following tool can be used to visualize how the Newton-Raphson method works. Using the slope  , the difference
, the difference  can be calculated and thus, the value of the new estimate can be computed accordingly. Use the slider to see how fast the method converges to the true solution using ,
can be calculated and thus, the value of the new estimate can be computed accordingly. Use the slider to see how fast the method converges to the true solution using ,  , and solving for the root of
, and solving for the root of ![f(x)=\sin[5x]+\cos[2x]=0](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ce12fca1e8554b4c99099a0b20f0d1f7_l3.png "Rendered by QuickLaTeX.com") .
.
Manipulate[
f[x_] := Sin[5 x] + Cos[2 x];
fp = D[f[x], x];
xtable = {0.4};
er = {1};
es = 0.0005;
MaxIter = 100;
i = 1;
While[And[i <= MaxIter, Abs[er[[i]]] > es], xnew = xtable[[i]] - (f[xtable[[i]]]/fp /. x -> xtable[[i]]); xtable = Append[xtable, xnew]; ernew = (xnew - xtable[[i]])/xnew; er = Append[er, ernew]; i++];
T = Length[xtable];
SolutionTable = Table[{i - 1, xtable[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
LineTable1 = Table[{{T[[i, 2]], 0}, {T[[i, 2]], f[T[[i, 2]]]}, {T[[i + 1, 2]],0}}, {i, 2, n - 1}];
Grid[{{Plot[f[x], {x, 0, 1}, PlotLegends -> {"f(x)"}, ImageSize -> Medium, Epilog -> {Dashed, Line[LineTable1]}]}, {Row[{"Iteration=", n - 2, " x_n=", T[[n, 2]], " f(x_n)=", f[T[[n, 2]]]}]}}], {n, 2, 7, 1}]
Depending on the shape of the function and the initial guess, the Newton-Raphson method can get stuck around the locations of oscillations of the function. The tool below visualizes the algorithm when trying to find the root of  with an initial guess of
with an initial guess of  . It takes 33 iterations before reaching convergence.
. It takes 33 iterations before reaching convergence.
Depending on the shape of the function and the initial guess, the Newton-Raphson method can get stuck in a loop. The tool below visualizes the algorithm when trying to find the root of with an initial guess of  . The algorithm goes into an infinite loop.
. The algorithm goes into an infinite loop.
In general, an initial guess that is close enough to the true root will guarantee quick convergence. The tool below visualizes the algorithm when trying to find the root of with an initial guess of  . The algorithm quickly converges to the desired root.
. The algorithm quickly converges to the desired root.
The following is the Mathematica code used to generate one of the tools above:
View Mathematica Code
Manipulate[
f[x_] := x^3 - x + 3;
fp = D[f[x], x];
xtable = {-0.1};
er = {1.};
es = 0.0005;
MaxIter = 100;
i = 1;
While[And[i <= MaxIter, Abs[er[[i]]] > es], xnew = xtable[[i]] - (f[xtable[[i]]]/fp /. x -> xtable[[i]]); xtable = Append[xtable, xnew]; ernew = (xnew - xtable[[i]])/xnew; er = Append[er, ernew]; i++];
T = Length[xtable];
SolutionTable = Table[{i - 1, xtable[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
LineTable1 = Table[{{T[[i, 2]], 0}, {T[[i, 2]], f[T[[i, 2]]]}, {T[[i + 1, 2]], 0}}, {i, 2, n - 1}];
Grid[{{Plot[f[x], {x, -3, 2}, PlotLegends -> {"f(x)"}, ImageSize -> Medium, Epilog -> {Dashed, Line[LineTable1]}]}, {Row[{"Iteration=", n - 2, " x_n=", T[[n, 2]], " f(x_n)=", f[T[[n, 2]]]}]}}] , {n, 2, 33, 1}]
Secant Method
The secant method is an alternative to the Newton-Raphson method by replacing the derivative with its finite-difference approximation. The secant method thus does not require the use of derivatives especially when is not explicitly defined. In certain situations, the secant method is preferable over the Newton-Raphson method even though its rate of convergence is slightly less than that of the Newton-Raphson method. Consider the problem of finding the root of the function . Starting with the Newton-Raphson equation and utilizing the following approximation for the derivative  :
:
![\[ f'(x_i)=\frac{f(x_i)-f(x_{i-1})}{x_i-x_{i-1}} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d0d703e34c25783035310166108ee027_l3.png "Rendered by QuickLaTeX.com")
the estimate for iteration can be computed as:
![\[ x_{i+1}=x_i-f(x_i)\frac{x_i-x_{i-1}}{f(x_i)-f(x_{i-1})} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c6d311072018853c2d7f34845f06989f_l3.png "Rendered by QuickLaTeX.com")
Obviously, the secant method requires two initial guesses and .
Example
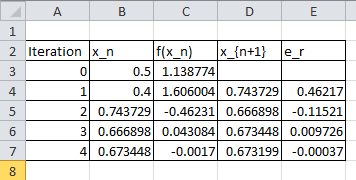
As an example, let’s consider the function . Setting the maximum number of iterations , , , and  , the following is the Microsoft Excel table produced:
, the following is the Microsoft Excel table produced:
The Mathematica code below can be used to program the secant method with the following output:
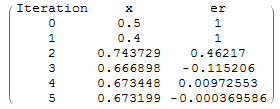
f[x_] := Sin[5 x] + Cos[2 x];
xtable = {0.5, 0.4};
er = {1,1};
es = 0.0005;
MaxIter = 100;
i = 2;
While[And[i <= MaxIter, Abs[er[[i]]] > es], xnew = xtable[[i]] - (f[xtable[[i]]]) (xtable[[i]] - xtable[[i - 1]])/(f[xtable[[i]]] -f[xtable[[i - 1]]]); xtable = Append[xtable, xnew]; ernew = (xnew - xtable[[i]])/xnew; er = Append[er, ernew]; i++];
T = Length[xtable];
SolutionTable = Table[{i - 1, xtable[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
T // MatrixForm
The following code runs the Secant method to find the root of a function with two initial guesses and . The value of the estimate and approximate relative error at each iteration is displayed in the command window. Additionally, two plots are produced to visualize how the iterations and the errors progress. The program waits for a keypress between each iteration to allow you to visualize the iterations in the figure. Call the function with secant(@(x) f(x), x0, x1). For example try secant(@(x) sin(5.*x)+cos(2.*x),0.5,0.4)
Convergence Analysis of the Secant Method
The estimate in the secant method is obtained as follows:
![\[ x_{i+1}=x_i-f(x_i)\frac{x_i-x_{i-1}}{f(x_i)-f(x_{i-1})} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b84b798efc0175333f5b2b1960673678_l3.png "Rendered by QuickLaTeX.com")
Multiplying both sides by -1 and adding the true value of the root where for both sides yields:
![\[ x_t-x_{i+1}=x_t-x_i+f(x_i)\frac{x_i-x_{i-1}}{f(x_i)-f(x_{i-1})} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1993d74da950f7d26b10ba068689e492_l3.png "Rendered by QuickLaTeX.com")
Using algebraic manipulations:
![\[ \begin{split} x_t-x_{i+1}&=\frac{(x_t-x_i)(f(x_i)-f(x_{i-1}))+f(x_i)(x_i-x_{i-1})}{f(x_i)-f(x_{i-1})}\\ &=\frac{f(x_i)(x_t-x_{i-1})-f(x_{i-1})(x_t-x_i)}{f(x_i)-f(x_{i-1})}\\ &=(x_t-x_{i-1})(x_t-x_i)\frac{\frac{f(x_i)}{x_t-x_i}-\frac{f(x_{i-1})}{x_t-x_{i-1}}}{f(x_i)-f(x_{i-1})} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e9e56f81563b88b0e12826549f008699_l3.png "Rendered by QuickLaTeX.com")
Using the Mean Value Theorem, the denominator on the right-hand side can be replaced with:
![\[ f(x_i)=f(x_{i-1})+f'(\zeta)(x_i-x_{i-1}) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9e7e242b38972674edc47293de87ff60_l3.png "Rendered by QuickLaTeX.com")
for some  between and
between and  . Therefore,
. Therefore,
![\[ x_t-x_{i+1}=(x_t-x_{i-1})(x_t-x_i)\frac{\frac{f(x_i)}{x_t-x_i}-\frac{f(x_{i-1})}{x_t-x_{i-1}}}{f'(\zeta)(x_i-x_{i-1})} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-292df7d69860ffdb2cd9c9a5aab2dfe8_l3.png "Rendered by QuickLaTeX.com")
Using Taylor’s theorem for  and around we get:
and around we get:
![\[\begin{split} \frac{f(x_i)}{x_t-x_i}=f'(x_t)+\frac{f''(\xi_1)}{2}{(x_t-x_i)}\\ \frac{f(x_i)}{x_t-x_{i-1}}=f'(x_t)+\frac{f''(\xi_2)}{2}{(x_t-x_{i-1})} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6775b5eb8381df36f43839b13b044c66_l3.png "Rendered by QuickLaTeX.com")
for some  between and and some
between and and some  between and . Using the above expressions we can reach the equation:
between and . Using the above expressions we can reach the equation:
![\[ x_t-x_{i+1}=(x_t-x_{i-1})(x_t-x_i)\frac{\frac{f''(\xi_1)}{2}{(x_t-x_i)}-\frac{f''(\xi_2)}{2}{(x_t-x_{i-1})}}{f'(\zeta)(x_i-x_{i-1})} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-2d46c4b9831529210eada05bb5d0b29b_l3.png "Rendered by QuickLaTeX.com")
and can be assumed to be identical and equal to , therefore:
![\[\begin{split} x_t-x_{i+1}&=(x_t-x_{i-1})(x_t-x_i)\frac{\frac{f''(\xi)}{2}{(x_t-x_i-x_t+x_{i-1})}}{f'(\zeta)(x_i-x_{i-1})}\\ &=(x_t-x_{i-1})(x_t-x_i)\frac{-f''(\xi)}{2f'(\zeta)} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-83b9edce2f74284e04719ee652fa6041_l3.png "Rendered by QuickLaTeX.com")
(2) 
Comparing 1 with 2 shows that the convergence in the secant method is not quite quadratic. To find the order of convergence, we need to solve the following equation for a positive  and
and  :
:
![\[ |E_{i+1}|=C|E_{i}|^p \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-4a42f833c4be4a94973326bdcd6fb923_l3.png "Rendered by QuickLaTeX.com")
Substituting into equation 2 yields:
![\[ C|E_{i}|^p=|E_{i}||E_{i-1}|\bigg{|}\frac{-f''(\xi)}{2f'(\zeta)}\bigg{|}\Rightarrow E_{i}=\left|\frac{-f''(\xi)}{2Cf'(\zeta)}\right|^{\frac{1}{p-1}}|E_{i-1}|^{\frac{1}{p-1}} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-bac4bb5f3a5ab59f5d920c39f59f56b9_l3.png "Rendered by QuickLaTeX.com")
But we also have:
![\[ |E_{i}|=C|E_{i-1}|^p \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c82e52c13c9b6c3fea3b4839e5706adf_l3.png "Rendered by QuickLaTeX.com")
Therefore:  . This equation is called the golden ratio and has the positive solution for :
. This equation is called the golden ratio and has the positive solution for :
![\[ p=\frac{\sqrt{5}+1}{2}\approx 1.618034 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-dd80d46a80eadfd8ca38abb95fdfeff1_l3.png "Rendered by QuickLaTeX.com")
while
![\[ C=\left|\frac{-f''(\xi)}{2f'(\zeta)}\right|^{p-1}=\left|\frac{-f''(\xi)}{2f'(\zeta)}\right|^{0.618034} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-2d1471e9fd2708e039fd2e0cab406d1f_l3.png "Rendered by QuickLaTeX.com")
implying that the error convergence is not quadratic but rather:
![\[ E_{i+1}\propto E_i^{1.618034} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e1c27c610c7ec0f1afefb661bbc7642d_l3.png "Rendered by QuickLaTeX.com")
The following tool visualizes how the secant method converges to the true solution using two initial guesses. Using ,  , , and solving for the root of yields
, , and solving for the root of yields  .
.
The following Mathematica Code was utilized to produce the above tool:
View Mathematica Code
Manipulate[
f[x_] := x^3 - x + 3;
f[x_] := Sin[5 x] + Cos[2 x];
xtable = {-0.5, -0.6};
xtable = {0.35, 0.4};
er = {1, 1};
es = 0.0005;
MaxIter = 100;
i = 2;
While[And[i <= MaxIter, Abs[er[[i]]] > es], xnew = xtable[[i]] - (f[xtable[[i]]]) (xtable[[i]] - xtable[[i-1]])/(f[xtable[[i]]] -f[xtable[[i - 1]]]); xtable = Append[xtable, xnew]; ernew = (xnew - xtable[[i]])/xnew; er = Append[er, ernew]; i++];
T = Length[xtable];
SolutionTable = Table[{i - 1, xtable[[i]], er[[i]]}, {i, 1, T}];
SolutionTable1 = {"Iteration", "x", "er"};
T = Prepend[SolutionTable, SolutionTable1];
T // MatrixForm;
If[n > 3,
(LineTable1 = {{T[[n - 2, 2]], 0}, {T[[n - 2, 2]], f[T[[n - 2, 2]]]}, {T[[n - 1, 2]], f[T[[n - 1, 2]]]}, {T[[n, 2]], 0}};
LineTable2 = {{T[[n - 1, 2]], 0}, {T[[n - 1, 2]], f[T[[n - 1, 2]]]}}), LineTable1 = {{}}; LineTable2 = {{}}];
Grid[{{Plot[f[x], {x, 0, 1}, PlotLegends -> {"f(x)"}, ImageSize -> Medium, Epilog -> {Dashed, Line[LineTable1], Line[LineTable2]}]}, {Row[{"Iteration=", n - 2, " x_n=", T[[n, 2]], " f(x_n)=", f[T[[n, 2]]]}]}}], {n, 2, 8, 1}]
Problems
- Let
![f:[-5,5]\rightarrow \mathbb{R}](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-973fb8d83043d95cb49ed34364c43946_l3.png "Rendered by QuickLaTeX.com") be such that
be such that  . Use the graphical method to find the number and estimates of the roots of each of the equations and
. Use the graphical method to find the number and estimates of the roots of each of the equations and  .
. - Compare the bisection method and the false position method in finding the roots of the two equations and
 in the interval where is:
in the interval where is:
![\[ f(x)=2x^3-4x^2+3x \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c76ad1b9a66895a53e90bb9cf6b91e6f_l3.png "Rendered by QuickLaTeX.com")
Compare with the result using the Solve function and comment on the use of
as a measure of the relative error. - Locate the first nontrivial root of
 where is in radians. Use the graphical method and the bisection method with
where is in radians. Use the graphical method and the bisection method with  .
. - Water is flowing in a trapezoidal channel at a rate of
 . The critical depth
. The critical depth  for such a channel must satisfy the equation:
for such a channel must satisfy the equation:
![\[ 1-\frac{Q^2}{g A_c^3}B=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-eeabb71db66495ea6152fa6e402c89b7_l3.png "Rendered by QuickLaTeX.com")
where
 ,
,  is the cross sectional area (
is the cross sectional area ( ), and
), and  is the width of the channel at the surface (
is the width of the channel at the surface ( ). Assuming that the width and the cross‐sectional area can be related to the depth by:
). Assuming that the width and the cross‐sectional area can be related to the depth by:![\[\begin{split} B&=3+y\\ A_c&=3y+\frac{y^2}{2} \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d34ef9428c58f24dcb1ff3dc3a9e1362_l3.png "Rendered by QuickLaTeX.com")
Solve for the critical depth using the graphical method, the bisection method, and the false position method to find the critical depth in the interval
![[0,3]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6abe4233622b81d2a4a66682455d476b_l3.png "Rendered by QuickLaTeX.com") . Use
. Use  . Discuss your results (difference in the methods, accuracy, number of iterations, etc.).
. Discuss your results (difference in the methods, accuracy, number of iterations, etc.).(Note: The critical depth is the depth below which the flow of the fluid becomes relatively fast and affected by the upstream conditions (supercritical flow). Above that depth, the flow is subcritical, relatively slow and is controlled by the downstream conditions)
- Use the graphical method to find all real roots of the equation
![\[ f(x)=-14-20x+19x^2-3x^3 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b57f446d63fbe067443facbf08f986c7_l3.png "Rendered by QuickLaTeX.com")
You are required to
- Plot the function several times by using smaller ranges for the axis to obtain the roots up to 3 significant digits.
- Explain the steps you have taken to identify the number and estimates of the roots.
- Explain the steps you have taken to obtain the roots to the required accuracy.
- Compare your results to the solution obtained using the “Solve” function in Mathematica.
- Plot the function several times by using smaller ranges for the
- Use the bisection method and the false position method to find all real roots of the equation
Use
. - Consider the function:
![\[ f(x)= -0.9 x^2+1.7x+2.5 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-16e0d3edff8681c02c4457ca62342049_l3.png "Rendered by QuickLaTeX.com")
Determine a root for the expression
- using fixed-point iteration
- using the Newton-Raphson method
Use an initial guess of
 and
and  . Compare your final answer with the Solve function in Mathematica.
. Compare your final answer with the Solve function in Mathematica. - Consider the function:
![\[ f(x)=7\sin{(x)} e^{-x}-1 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-bb9950dec77cd3b8db689b8a5666b1ab_l3.png "Rendered by QuickLaTeX.com")
Find the lowest positive root for the expression
- graphically
- using the Newton-Raphson method
- using the secant method
- Use the Newton-Raphson method to find the root of:
![\[ f(x)=e^{-0.5x}(4-x)-2=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-153363f520cae79fff15038f56dbefa1_l3.png "Rendered by QuickLaTeX.com")
Employ initial guesses of 2, 6, and 8. Explain your results.
- The Manning equation can be written for a rectangular open channel as:
![\[ Q=\frac{\sqrt{S}(BH)^\frac{5}{3}}{n(B+2H)^{\frac{2}{3}}} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b3932f346be59b2c4a726230af37f238_l3.png "Rendered by QuickLaTeX.com")
where
 is the fluid flow in
is the fluid flow in  ,
,  is the slope in
is the slope in  ,
,  is the depth in , and is the Manning roughness coefficient. Develop a fixed-point iteration scheme to solve this equation for given
is the depth in , and is the Manning roughness coefficient. Develop a fixed-point iteration scheme to solve this equation for given  ,
,  ,
,  , and
, and  . Consider . Prove that your scheme converges for all initial guesses greater than or equal to zero.
. Consider . Prove that your scheme converges for all initial guesses greater than or equal to zero. - Why does the Babylonian method almost always converge?
- Consider the function
![\[ f(x)=e^{-x}-x \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b6a4b3a68bcf3bfdd2347e0b00ef5df8_l3.png "Rendered by QuickLaTeX.com")
Compare the secant method and the Newton-Raphson method in finding the root of the equation
. - Solve the previous question using the Fixed-Point Iteration method
- Use the Fixed-Point Iteration method to find the roots of the following functions:
![\[ f_1(x)=1-\frac{x^2}{4} \quad f_2(x)=2\sqrt{x-1}-x \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e9ef3508a7c9601303c2f4b7118dd5e7_l3.png "Rendered by QuickLaTeX.com")