
Linear Maps between vector spaces: Basic Definitions
Linear Maps
A linear map  between two vectors spaces
between two vectors spaces  and
and  is a function
is a function  such that
such that  :
:
![\[ T(\alpha u + \beta v)=\alpha T(u)+\beta T(v) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-aa1a80350318587b9117fbd4c9e40853_l3.png "Rendered by QuickLaTeX.com")
Notice that the addition of two linear maps and their multiplication by scalars produce linear map as well, which imply that the set of linear maps is also a linear vector space.
It is important not to confuse linear maps with affine maps. For example, the function  defined such that
defined such that  is not a linear map but rather an affine map.
is not a linear map but rather an affine map.  is not a liner map since in general
is not a liner map since in general  . On the other hand, the function
. On the other hand, the function  defined such that
defined such that  is indeed a linear map.
is indeed a linear map.
Tensors
Linear maps between finite dimensional linear vector spaces can also be referred to as Tensors. Tensor analysis provides a natural and concise mathematical tool for the analysis of various engineering problems, in particular, solid mechanics. For a detailed description of tensors, refer to the Wolfram article on tensors.
According to wikipedia, the origin of the word “Tensors” dates back to the nineteenth century when it was introduced by Woldemar Voigt. It is likely that the word originated because one of the early linear operators introduced was the symmetric Cauchy stress matrix which functions to convert area vectors to force vectors. At the time, perhaps the scientists were interested in things that “stretch” and thus, the word “Tensor” from the Latin route “Tendere” came about.
Kernel of Linear Maps
Let be a linear map between two vector spaces and . Then, the kernel of or  is the set of all vectors that are mapped into the zero vector, i.e.:
is the set of all vectors that are mapped into the zero vector, i.e.:
![\[ \ker(T)=\{x\in V|T(x)=0\} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1696538d8c1683041d8228ff742b18a4_l3.png "Rendered by QuickLaTeX.com")
For example, consider the linear map  defined such that
defined such that  . Then, the kernel of this linear map consists of al the vectors in
. Then, the kernel of this linear map consists of al the vectors in  that are mapped to zero, i.e., the vectors whose components
that are mapped to zero, i.e., the vectors whose components  and
and  satisfy:
satisfy:
![\[ 5x_1 + 6x_2=0\Rightarrow x_1=-1.2x_2 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-25f1076e27a97f426bc432bbc4af5659_l3.png "Rendered by QuickLaTeX.com")
There are infinitely many vectors that satisfy this condition. The set of all those vectors is given as: 
Matrix Representation of Linear Maps
The matrix representation of linear maps is the most convenient way to represent linear maps when orthonormal basis sets are chosen for the underlying vector spaces. Consider the linear map  . Let
. Let  and
and  be the orthonormal basis sets for
be the orthonormal basis sets for  and
and  respectively. Then, because of the linearity of the map, the map is indeed well defined by the components of the vectors
respectively. Then, because of the linearity of the map, the map is indeed well defined by the components of the vectors  . Since
. Since  we can assume that it has
we can assume that it has  components which can be denoted as follows:
components which can be denoted as follows:
![\[ Te_j=T_{1j} e'_1+T_{2j} e'_2+\cdots+T_{mj} e'_m=\sum_{i=1}^m T_{ij}e'_i \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c15436243e1e5087614f2643109c719b_l3.png "Rendered by QuickLaTeX.com")
Therefore,  and its image under has the form:
and its image under has the form:
![\[ T\sum_{j=1}^n(x_je_j)=\sum_{j=1}^n(x_jTe_j)=\sum_{i=1}^m \sum_{j=1}^n T_{ij}x_j e'_i \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-bffd1d85bdda13486acd3d0bb07d01fd_l3.png "Rendered by QuickLaTeX.com")
Which in traditional matrix form admits the representation:
![\[ Tx= \left( \begin{array}{cccc} T_{11}&T_{12}&\cdots&T_{1n}\\ T_{21}&T_{22}&\cdots&T_{2n}\\ \vdots & \vdots &\ddots &\vdots\\ T_{m1}&T_{m2}&\cdots &T_{mn} \end{array} \right) \left( \begin{array}{cc} x_1\\ x_2\\ \vdots\\ \vdots\\ x_n \end{array} \right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5d51696465e10c406c89b1654760eeed_l3.png "Rendered by QuickLaTeX.com")
Notice that the vectors are the column vectors of the matrix representation .
Matrix Representation and Change of Basis
The components of the matrix representation of defined above depend on the choice of the orthonormal basis sets for each vector space. For the discussion in this section, we will restrict ourselves to square matrices, i.e., linear maps between vector spaces of the same dimension.
Let  . Let be the chosen orthonormal basis set for both vector spaces and let
. Let be the chosen orthonormal basis set for both vector spaces and let  be another orthonormal basis set and let
be another orthonormal basis set and let  be the matrix of coordinate transformation as defined in the Change of Basis section. The matrix representation of when
be the matrix of coordinate transformation as defined in the Change of Basis section. The matrix representation of when  is chosen as the basis set is denoted by
is chosen as the basis set is denoted by  . The relationship between and can be obtained as follows:
. The relationship between and can be obtained as follows:
Let  , denote
, denote  . Let
. Let  and
and  denote the representation of
denote the representation of  and
and  when is chosen as the coordinate system. Therefore in each coordinate system we have:
when is chosen as the coordinate system. Therefore in each coordinate system we have:
![\[ y'=T'x'\hspace{10mm} y=Tx \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5e510eb87305bf66b4d668ec508911e9_l3.png "Rendered by QuickLaTeX.com")
In addition, the relationship between the coordinates in the two coordinate systems is given by:
![\[ x'=Qx\hspace{10mm}y'=Qy \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a1a281777eb2a4e417a44a35f69bc2b3_l3.png "Rendered by QuickLaTeX.com")
Therefore:
![\[ y'=T'x'=T'Qx\hspace{10mm}\text{ and }\hspace{10mm}y'=Qy=QTx\Rightarrow T'Qx=QTx \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6797b356d33ece358238963cfe6d9259_l3.png "Rendered by QuickLaTeX.com")
This is true for every , therefore:
![\[ T'Q=QT\Rightarrow T'=QTQ^T \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-3f44e5b91475e13b8b825ecbb4cd3a81_l3.png "Rendered by QuickLaTeX.com")
In the following tool, you can choose the components of the matrix  and the vector
and the vector  along with an angle
along with an angle  of the counterclockwise rotation of the coordinate system. The tool then applies the transformation of coordinates from the coordinate system
of the counterclockwise rotation of the coordinate system. The tool then applies the transformation of coordinates from the coordinate system  , to
, to  where
where  ,
,  are vectors rotated by counterclockwise from
are vectors rotated by counterclockwise from  , and
, and  . On the left hand side, the tool draws the vector
. On the left hand side, the tool draws the vector  in blue, the vector
in blue, the vector  in red, the original coordinate system in black, and the vectors of the new coordinate system in dashed black. At the bottom of the left hand side drawing you will find the expressions for ,
in red, the original coordinate system in black, and the vectors of the new coordinate system in dashed black. At the bottom of the left hand side drawing you will find the expressions for ,  ,
,  , , and using the basis set
, , and using the basis set  . On the right hand side, the tool draws the vectors
. On the right hand side, the tool draws the vectors  in blue,
in blue,  in red, and the new coordinate system in black. At the bottom of the right hand side, you will find the expressions for ,
in red, and the new coordinate system in black. At the bottom of the right hand side, you will find the expressions for ,  , and
, and  using the basis set .
using the basis set .
Similarly, the following tool is for three dimensional Euclidean vector spaces. The new coordinate system  is obtained by simultaneously applying a counterclockwise rotation
is obtained by simultaneously applying a counterclockwise rotation  ,
,  , and
, and  around the first, second, and third coordinate system axis, respectively.
around the first, second, and third coordinate system axis, respectively.
Tensor Product
Let  and
and  . The tensor product denoted by
. The tensor product denoted by  is a linear map
is a linear map  defined such that
defined such that  :
:
![\[ (v\otimes u) x=(x\cdot u)v \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ddb63abd675652328f990fe6d8a4b1d6_l3.png "Rendered by QuickLaTeX.com")
In simple words, the tensor product defined above utilizes the linear dot product operation and a fixed vector  to produce a real number using the expression
to produce a real number using the expression  , which is conveniently a linear function of . The resulting number is then multiplied by the vector .
, which is conveniently a linear function of . The resulting number is then multiplied by the vector .
Obviously, the tensor product of vectors belonging to vector spaces of dimensions higher than 1 are not invertible, in fact, the range of is one dimensional (why?)!
The following are some of the properties of the tensor product that can be deduced directly from the definition and the properties of the dot product operation,  :
:
![\[ (\alpha u + \beta v)\otimes w=\alpha (u\otimes w) + \beta (v\otimes w) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c5c3d9d684b5f5146595d86943b934aa_l3.png "Rendered by QuickLaTeX.com")
![\[ w\otimes(\alpha u + \beta v)=\alpha (w\otimes u) + \beta (w\otimes v) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b6dd1ef0a9b6191b06031f7f846ec4c6_l3.png "Rendered by QuickLaTeX.com")
![\[ (a\otimes u)(v\otimes w)=(u\cdot v)(a\otimes w) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-80713cb2222f78a7e40db5852635bcf0_l3.png "Rendered by QuickLaTeX.com")
![\[ T\left(u\otimes w\right)=Tu\otimes w \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-31d32194c5ebb757e734448c9b06f02a_l3.png "Rendered by QuickLaTeX.com")
Another property is that if  and
and  are three orthonormal vectors, then:
are three orthonormal vectors, then:
![\[ I=p\otimes p + q\otimes q + r\otimes r \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-7a5fe8335588d5cec3fd90e0f12de4c5_l3.png "Rendered by QuickLaTeX.com")
It is important to note that the tensor product defined here is sometimes referred to as the dyadic product or the outer product of two vectors which is a particular type of the more general tensor product.
Matrix Representation of the Tensor Product
Let  and consider the tensor product . Consider the orthonormal basis set
and consider the tensor product . Consider the orthonormal basis set  . Then, the tensor product can be expressed in component form as follows:
. Then, the tensor product can be expressed in component form as follows:
![\[ v\otimes u=(v_1e_1+v_2e_2+v_3e_3)\otimes (u_1e_1+u_2e_2+u_3e_3)=\sum_{i,j=1}^3 v_iu_j (e_i\otimes e_j) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e8abb8f104f7792b416316ca6e17b3ee_l3.png "Rendered by QuickLaTeX.com")
Now,  we have:
we have:
![\[ (v\otimes u)x=\sum_{i,j,k=1}^3 v_iu_j (e_i\otimes e_j)(x_ke_k)=\sum_{i,j=1}^3 v_iu_j x_j e_i \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f0fe410e6cb18eedde9ce7fb8012ccec_l3.png "Rendered by QuickLaTeX.com")
Which, can be represented in matrix form as follows:
![\[ (v\otimes u)x= \left( \begin{array}{cc} \sum_{j=1}^3 v_1u_j x_j\\ \sum_{j=1}^3 v_2u_j x_j\\ \sum_{j=1}^3 v_3u_j x_j \end{array} \right)= \left( \begin{array}{ccc} v_1u_1&v_1u_2&v_1u_3\\ v_2u_1&v_2u_2&v_2u_3\\ v_3u_1&v_3u_2&v_3u_3 \end{array} \right) \left( \begin{array}{cc} x_1\\ x_2\\ x_3 \end{array} \right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-9fb460b4005351c8f1d046811bd709f2_l3.png "Rendered by QuickLaTeX.com")
Tensor Product Representation of Linear Maps
A linear map can be decomposed into the sum of multiple tensor products. For example, one can think of a linear map between three dimensional vector spaces, as the sum of three tensor products:
![\[ T=u\otimes x +v\otimes y + w\otimes z \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-339846d1508b02e325249bb20ec4fab6_l3.png "Rendered by QuickLaTeX.com")
For this map to be invertible, each of the sets  and
and  has to be linearly independent (why?).
has to be linearly independent (why?).
There is a direct relationship between the tensor product representation and the matrix representation as follows: let  and let be an orthonormal basis set for both vector spaces, then, :
and let be an orthonormal basis set for both vector spaces, then, :
![\[ Tx=T\sum_{j=1}^3(x_je_j)=\sum_{j=1}^3(x_jTe_j)=\sum_{i=1}^3 \sum_{j=1}^3 T_{ij}x_j e_i=\sum_{i=1}^3 \sum_{j=1}^3 T_{ij}(x\cdot e_j) e_i=\sum_{i=1}^3 \sum_{j=1}^3 T_{ij}(e_i\otimes e_j) x \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-cf18970d605b3fc9dc2da6e4660bb4c3_l3.png "Rendered by QuickLaTeX.com")
Therefore, any linear map can be represented as the sum of nine tensor product components
![\[ T=\sum_{i=1}^3 \sum_{j=1}^3 T_{ij}(e_i\otimes e_j) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-1dddd36f5e0a0c6e60a93588f1a07eed_l3.png "Rendered by QuickLaTeX.com")
The Set of Linear Maps
In these pages, the notation  is used to denote the set of linear maps between and . i.e.,:
is used to denote the set of linear maps between and . i.e.,:
![\[ \mathbb{B}(\mathbb{R}^n,\mathbb{R}^m)=\{T:\mathbb{R}^n\rightarrow \mathbb{R}^m|T \text{ is linear}\} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f49e7931719d2dd20decf2b1108d203b_l3.png "Rendered by QuickLaTeX.com")
In addition, the short notation  is used to denote the set of linear maps between and . i.e.,
is used to denote the set of linear maps between and . i.e.,
![\[ \mathbb{B}(\mathbb{R}^n)=\{T:\mathbb{R}^n\rightarrow \mathbb{R}^n|T \text{ is linear}\} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-43c6cc9c82b513bf0ad2ca1d3e69f4c9_l3.png "Rendered by QuickLaTeX.com")
We also freely use the set of  matrices denoted
matrices denoted  to denote .
to denote .
The Algebraic Structure of the Set of Linear Maps
In addition to being a vector space, the elements of the sets of linear maps has an algebraic structure arising naturally from the composition operation. Let  and
and  , then, the composition map
, then, the composition map  is also a linear map since
is also a linear map since :
:
![\[ \begin{split} T(\alpha x + \beta y)&=V\circ U(\alpha x + \beta y)\\ &=V(U((\alpha x + \beta y)))\\ &=V(\alpha U(x)+\beta U(y))\\ &=\alpha V(U(x)) + \beta V(U(y))\\ &=\alpha T(x) + \beta T(y) \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-25756620a77914c716953e513a52c4b2_l3.png "Rendered by QuickLaTeX.com")
Let . If and  are the matrices associated with the linear maps
are the matrices associated with the linear maps  and respectively, then, the components of the matrix
and respectively, then, the components of the matrix  associated with the linear map can be obtained from the equality:
associated with the linear map can be obtained from the equality:  :
:
![\[ \begin{split} Lx&=\left( \begin{array}{c} \sum_{j=1}^nL_{1j}x_j\\ \sum_{j=1}^nL_{2j}x_j\\ \cdots\\ \sum_{j=1}^nL_{lj}x_j \end{array} \right)\\ NMx&=N\left( \begin{array}{c} \sum_{j=1}^nM_{1j}x_j\\ \sum_{j=1}^nM_{2j}x_j\\ \cdots\\ \sum_{j=1}^nM_{mj}x_j \end{array}\right) = \left( \begin{array}{c} \sum_{k=1}^m\sum_{j=1}^nN_{1k}M_{kj}x_j\\ \sum_{k=1}^m\sum_{j=1}^nN_{1k}M_{kj}x_j\\ \cdots\\ \sum_{k=1}^m\sum_{j=1}^nN_{lk}M_{kj}x_j \end{array} \right) \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-56b9db234b11e9fe5fe56c841d4dd45c_l3.png "Rendered by QuickLaTeX.com")
Therefore, the components  can be calculated from the components of and as follows:
can be calculated from the components of and as follows:
![\[ L_{ij}=\sum_{k=1}^mN_{ik}M_{kj} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-45b5ba4f1962bf690b02845e5b6a9bb8_l3.png "Rendered by QuickLaTeX.com")
In otherwords, the component in the  row and the
row and the  column of is equal to the multiplication of the components in the row of by the components in the column of . Notice that the operation
column of is equal to the multiplication of the components in the row of by the components in the column of . Notice that the operation  is well defined while the operation
is well defined while the operation  isn’t because of the difference in the dimensions
isn’t because of the difference in the dimensions  of the above spaces.
of the above spaces.
However, if  , and their respective associated matrices are
, and their respective associated matrices are  then both composition maps are well defined. The first one is the composition map
then both composition maps are well defined. The first one is the composition map  with its associated matrix while the second is the composition map
with its associated matrix while the second is the composition map  and its associated matrix . In general, these two maps are not identical.
and its associated matrix . In general, these two maps are not identical.
The identity map  and its associated identity matrix
and its associated identity matrix  is the identity element in the algebraic structure of
is the identity element in the algebraic structure of
Bijective (Invertible) Linear Maps:
In this section, we are concerned with the linear maps represented by square matrices  and whether these linear maps (linear functions) are invertible or not. Recall from the Mathematical Preliminaries section that a function
and whether these linear maps (linear functions) are invertible or not. Recall from the Mathematical Preliminaries section that a function  is invertible if
is invertible if  such that
such that  .
.  is denoted by
is denoted by  . Let’s now consider the linear map (represented by a matrix ) , what are the conditions that guarantee the existence of such that
. Let’s now consider the linear map (represented by a matrix ) , what are the conditions that guarantee the existence of such that  where is the identity matrix? We will answer this question using a few statements:
where is the identity matrix? We will answer this question using a few statements:
Statement 1: Let be a linear map. Then  .
.
This statement is simple to prove. First note that since is a linear map, then  .
.
First, assume is injective. Since and since is injective therefore, 0 is the unique image of 0. Therefore,  . For the opposite statement, assume that . We will argue by contradiction, i.e., assuming that is not injective. Therefore,
. For the opposite statement, assume that . We will argue by contradiction, i.e., assuming that is not injective. Therefore,  with
with  but
but  . Since is linear we have
. Since is linear we have  . Therefore,
. Therefore,  which is a contradiction. Therefore is injective.
which is a contradiction. Therefore is injective.

Statement 2: Let be a linear map. Then  .
.
First assume that is invertible, therefore, is injective. Statement 1 asserts then that .
Assume now that . Therefore, from statement 1, is injective. We need to show that is surjective. Note that using Statement 1, and since an invertible map is also injective, then we just need to show that  . This can be proven by picking a basis set for and showing that the set
. This can be proven by picking a basis set for and showing that the set  is linearly independent which right away implies that is surjective. Since is injective and is linearly independent we have:
is linearly independent which right away implies that is surjective. Since is injective and is linearly independent we have:
![\[ T\left(\sum_{i=1}^n\alpha_ie_i\right)=\sum_{i=1}^n\alpha_iTe_i=0 \Leftrightarrow \sum_{i=1}^n\alpha_ie_i=0 \Leftrightarrow \forall i:\alpha_i=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-d6e057a177aad1c14b2ea84fcd923e67_l3.png "Rendered by QuickLaTeX.com")
Therefore:
![\[ \sum_{i=1}^n\alpha_iTe_i=0 \Leftrightarrow \forall i:\alpha_i=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a54d82436e14d0462d7633ce5be7c250_l3.png "Rendered by QuickLaTeX.com")
Therefore,  are linearly independent set of vectors in and in the range of . Therefore.
are linearly independent set of vectors in and in the range of . Therefore.  such that
such that
![\[ y=y_1Te_1+y_2Te_2+\cdots+y_nTe_n=T(y_1e_1+y_2e_2+\cdots+y_ne_n) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6ccba9132ee89aab39c2908406b795d1_l3.png "Rendered by QuickLaTeX.com")
Therefore,  is the preimage of . Therefore, is surjective.
is the preimage of . Therefore, is surjective.
Statement 3: Let be a linear map. Then  the
the  vectors forming the square matrix of are linearly independent.
vectors forming the square matrix of are linearly independent.
First assume that  are linearly independent vectors that form the row vectors of the linear map
are linearly independent vectors that form the row vectors of the linear map  . We will argue by contradiction. Assume that
. We will argue by contradiction. Assume that  and
and  . Then,
. Then,  . However, since are linearly independent, they form a basis set and can be expressed in terms of all of them. Therefore
. However, since are linearly independent, they form a basis set and can be expressed in terms of all of them. Therefore  . But is orthogonal to all of them, then
. But is orthogonal to all of them, then  . Therefore, and the map is bijective using statement 2.
. Therefore, and the map is bijective using statement 2.
For the opposite direction, assume that the map is bijective yet are linearly dependent. Since they are linearly dependent, therefore there is at least one vector that can be represented as a linear combination of the other vectors. Without loss of generality, assume that  . Therefore
. Therefore
![\[\begin{split} \forall x\in\mathbb{R}^n:Tx&=\sum_{i=1}^n (v_i\cdot x)e_i=\sum_{i=1}^{n-1}\left((v_i\cdot x)e_i\right)+\left(\left(\sum_{i=1}^{n-1}\alpha_iv_i\right)\cdot x\right)e_n\\ & =\sum_{i=1}^{n-1}(v_i\cdot x)(e_i+\alpha_ie_n) \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-6d4c6eb88dd6220680c8f21c2a91e2d9_l3.png "Rendered by QuickLaTeX.com")
This shows that the range of has at most  dimensions, therefore is not surjective, which is a contradiction.
dimensions, therefore is not surjective, which is a contradiction.
Statement 3 asserts that a square matrix is invertible if and only if the rows are linearly independent. In the following section, we will present the determinant of a matrix as a measure of whether the rows are linearly independent or not.
Determinant:
The determinant of a matrix representation of a linear map is a real valued function of the components of a square matrix. The determinant is used to indicate whether the rows of the matrix are linearly dependent or not. If they are, then the determinant is equal to zero, otherwise, the determinant is not equal to zero. In the following, we will show the definition of the determinant function for  ,
,  and for a general . We will also verify that the determinant of is equal to zero if and only if the row vectors of the matrix are linearly dependent for the cases and .
and for a general . We will also verify that the determinant of is equal to zero if and only if the row vectors of the matrix are linearly dependent for the cases and .
Determinant of :
Let such that
![\[ M=\left(\begin{matrix}a_1 & a_2\\b_1& b_2\end{matrix}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-938c8fe284bde5c67ae39470f8278722_l3.png "Rendered by QuickLaTeX.com")
The determinant of is defined as:
![\[ \det{M}=a_1b_2-a_2b_1 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-5047ce9d5c3ecbfd4a7cfa40a4fa9b3c_l3.png "Rendered by QuickLaTeX.com")
Clearly, the vectors  and
and  are linearly dependent if and only if
are linearly dependent if and only if  . The determinant of the matrix has a geometric meaning (See Figure 1). Consider the two unit vectors
. The determinant of the matrix has a geometric meaning (See Figure 1). Consider the two unit vectors  and
and  . Let
. Let  and
and  . The area of the parallelogram formed by and is equal to the determinant of the matrix .
. The area of the parallelogram formed by and is equal to the determinant of the matrix .
The following is true  and
and  :
:
![\[\begin{split} \det{(NM)} & =\det{N}\det{M}\\ \det{\alpha M}& =\alpha^2\det{M}\\ \det{I} & = 1 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-8919225344800542585ec619b32e6d40_l3.png "Rendered by QuickLaTeX.com")
 is the identity matrix.
is the identity matrix.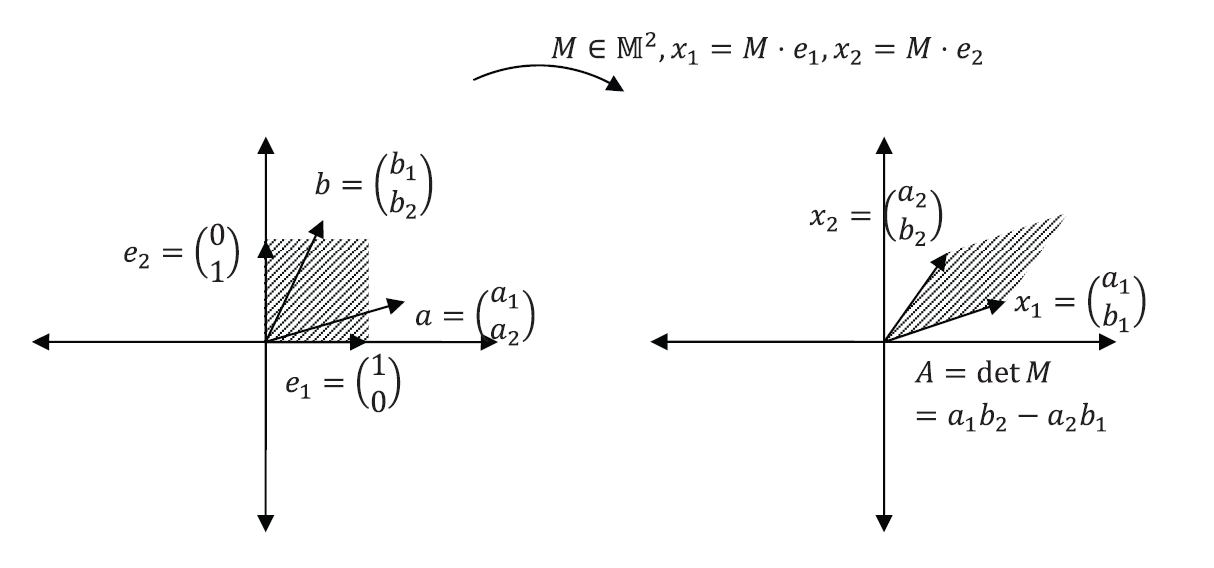
Figure 1. Area transformation under 
Determinant of  :
:
Let such that
![\[ M=\left(\begin{matrix}a_1 & a_2 & a_3\\b_1& b_2& b_3\\c_1&c_2&c_3\end{matrix}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e8ffcf638157fb10bd37a455d86087a7_l3.png "Rendered by QuickLaTeX.com")
If  ,
,  , and
, and  , then the determinant of is defined as:
, then the determinant of is defined as:
![\[ \det{M}=a\cdot (b\times c) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a1fac1a3f31dd0946f5ced9e984fcef5_l3.png "Rendered by QuickLaTeX.com")
I.e.,  the tripe product of
the tripe product of  ,
,  , and
, and  . From the results of the triple product, the vectors , , and are linearly dependent if and only if . The determinant of the matrix has a geometric meaning (See Figure 2). Consider the three unit vectors
. From the results of the triple product, the vectors , , and are linearly dependent if and only if . The determinant of the matrix has a geometric meaning (See Figure 2). Consider the three unit vectors  ,
,  , and
, and  . Let , , and
. Let , , and  . The determinant of is also equal to the triple product of ,
. The determinant of is also equal to the triple product of ,  , and and gives the volume of the parallelepiped formed by , , and .
, and and gives the volume of the parallelepiped formed by , , and .
![\[\begin{split} \det{M}&=a\cdot(b\times c)=a_1(b_2c_3-b_3c_2)+a_2(b_3c_1-b_1c_3)+a_3(b_1c_2-b_2c_1)\\ &=a_1(b_2c_3-b_3c_2)+b_1(a_3c_2-a_2c_3)+c_1(a_2b_3-b_2a_3)\\ &=x_1\cdot (x_2\times x_3)\\ &=Me_1\cdot (Me_2\times Me_3) \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-20c5d1787141ee45d12c3bfd842aacde_l3.png "Rendered by QuickLaTeX.com")
Additionally,  and
and  are linearly independent, it is straightforward to show the following:
are linearly independent, it is straightforward to show the following:
![\[ \det{M}=\frac{Mu\cdot(Mv\times Mw)}{u\cdot (v\times w)} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-3d14b79bbfe01778829f085b5f47278e_l3.png "Rendered by QuickLaTeX.com")
In other words, the determinant gives the ratio between  and
and  where is the volume of the transformed parallelepiped between
where is the volume of the transformed parallelepiped between  ,
,  , and
, and  and is the volume of the parallelepiped between , , and
and is the volume of the parallelepiped between , , and  .
.
The alternator  defined in Mathematical Preliminaries can be used to write the followign useful equality:
defined in Mathematical Preliminaries can be used to write the followign useful equality:
![\[ \det{M}=Me_1\cdot(Me_2\times Me_3)\Rightarrow Me_i\cdot(Me_j\times Me_k)=\varepsilon_{ijk} \det{M} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-4193116be409ba47ae9fcd701d3b7d29_l3.png "Rendered by QuickLaTeX.com")
The following is true  and :
and :
![\[\begin{split} \det{(NM)} & =\det{N}\det{M}\\ \det{\alpha M}& =\alpha^3\det{M}\\ \det{I} & = 1 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-7b6d5347763d074264b40c83b1880ef7_l3.png "Rendered by QuickLaTeX.com")
where  is the identity matrix.
is the identity matrix.
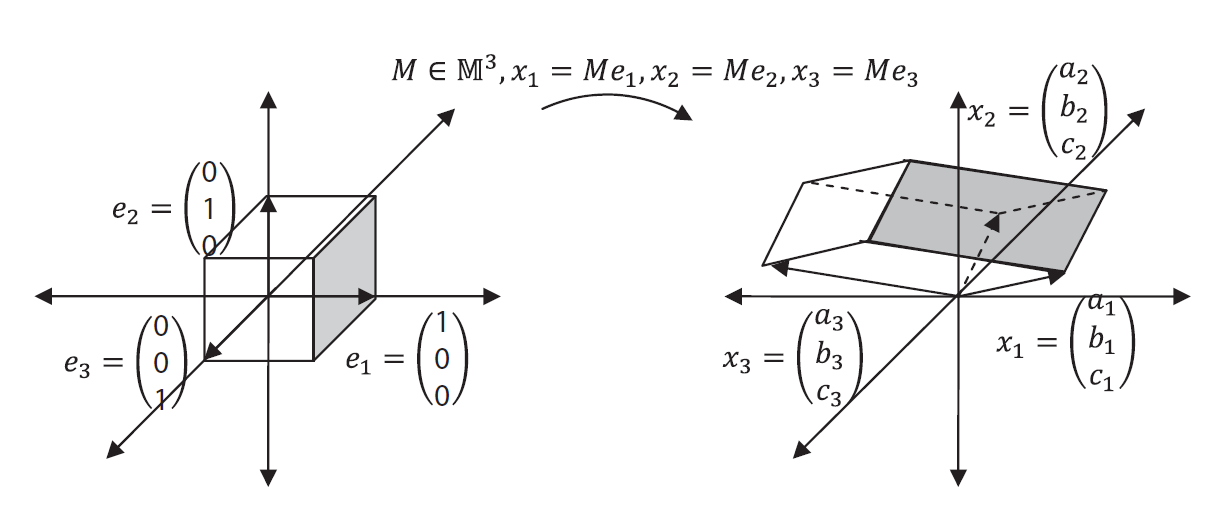
Figure 2. Volume transformation under 
Area Transformation in  :
:
The following is a very important formula (often referred to as “Nanson’s Formula”) that relates the cross product of vectors in to the cross product of their images under a linear transformation. This formula is used to relate area vectors before mapping to area vectors after mapping.
Assertion:
Let . Let be an invertible matrix. Show the following relationship:
![\[ Mu\times Mv = (\det{M})M^{-T}\left(u\times v\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-b8272e07d8a8e8c869d6bc6eb1dfa8ec_l3.png "Rendered by QuickLaTeX.com")
Proof:
Let be an arbitrary vector in . From the relationships above we have:
![\[ Mw\cdot \left(Mu\times Mv\right)=(\det{M}) w\cdot (u\times v) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-430adb04b6697eed44e337066f69087f_l3.png "Rendered by QuickLaTeX.com")
Therefore:
![\[ w\cdot M^T\left(Mu\times Mv\right)=(\det{M}) w\cdot (u\times v) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-88ac4379d379e5146255f8b036ed8956_l3.png "Rendered by QuickLaTeX.com")
Since is arbitrary, it is straightforward to show that the vectors  and
and  are equal. And, since is invertible, so, is
are equal. And, since is invertible, so, is  . Therefore:
. Therefore:
Nanson’s formula is sometimes written as follows:
![\[ a n = (\det{M})M^{-T}\left(A N\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-4d75a509a0899df5cb70f3efc14bc1fa_l3.png "Rendered by QuickLaTeX.com")
where
![\[\begin{split} A&=\|u\times v\|\\ N&=\frac{1}{A}(u\times v)\\ a&=\|Mu\times Mv\|\\ n&=\frac{1}{a}(Mu\times Mv) \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-86faedf1d87838b874a85cd99ee651a0_l3.png "Rendered by QuickLaTeX.com")
Determinant of :
The determinant of is defined using the recursive relationship:
![\[ \det{M}=\sum_{i=1}^n(-1)^{(i+1)}M_{1i}\det{N_i} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a459296a358ec0620b971bfb19bf0ce5_l3.png "Rendered by QuickLaTeX.com")
where  and is formed by eliminating the 1st row and column of the matrix . It can be shown that
and is formed by eliminating the 1st row and column of the matrix . It can be shown that  the rows of are linearly dependent.
the rows of are linearly dependent.
Eigenvalues and Eigenvectors
Let  .
.  is called an eigenvalue of the tensor if
is called an eigenvalue of the tensor if  such that
such that  . In this case,
. In this case,  is called an eigenvector of associated with the eigenvalue
is called an eigenvector of associated with the eigenvalue  .
.
Notice that any nonzero multiplier of an eigenvector is again an eigenvector: If then  is an eigenvector of . In addition, a nonzero linear combination of eigenvectors associated with the same eigenvalue is also an eigenvector:
is an eigenvector of . In addition, a nonzero linear combination of eigenvectors associated with the same eigenvalue is also an eigenvector:
If and  then
then  with
with  and
and  :
:  is an eigenvector of .
is an eigenvector of .
Similar Matrices
Let . Let be an invertible tensor. The matrix representations of the tensors and  are termed “similar matrices”.
are termed “similar matrices”.
Similar matrices have the same eigenvalues while their eigenvectors differ by a linear transformation as follows: If  is an eigenvalue of with the associated eigenvector then:
is an eigenvalue of with the associated eigenvector then:
![\[ Mp=\lambda p\Rightarrow MT^{-1}Tp=\lambda T^{-1}Tp\Rightarrow TMT^{-1}(Tp)=\lambda (Tp) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-0281bd5ea72e525409414af7addd9b23_l3.png "Rendered by QuickLaTeX.com")
Therefore, is an eigenvalue of and  is the associated eigenvector. Similarly, if is an eigenvalue of with the associated eigenvector
is the associated eigenvector. Similarly, if is an eigenvalue of with the associated eigenvector  then:
then:
![\[ TMT^{-1}q=\lambda q\Rightarrow MT^{-1}q=\lambda T^{-1}q\Rightarrow M(T^{-1}q)=\lambda (T^{-1}q) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-f51720b685eb7855c19dfd2d97048672_l3.png "Rendered by QuickLaTeX.com")
Therefore, is an eigenvalue of and  is the associated eigenvector. Therefore, similar matrices share the same eigenvalues.
is the associated eigenvector. Therefore, similar matrices share the same eigenvalues.
The Eigenvalue and Eigenvector Problem
Given a tensor , we seek a nonzero vector  and a real number such that: . This is equivalent to
and a real number such that: . This is equivalent to  . In other words, the eigenvalue is a real number that makes the tensor
. In other words, the eigenvalue is a real number that makes the tensor  not invertible while the eigenvector is a non-zero vector
not invertible while the eigenvector is a non-zero vector  . Considering the matrix representation of the tensor , the eigenvalue is the solution to the following equation:
. Considering the matrix representation of the tensor , the eigenvalue is the solution to the following equation:
![\[ \det(M-\lambda I)=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-65e5b483f4789bbd1dae312a53462035_l3.png "Rendered by QuickLaTeX.com")
The above equation is called the characteristic equation of the matrix .
From the properties of the determinant function, the characteristic equation is an  degree polynomial of the unknown where is the dimension of the underlying space.
degree polynomial of the unknown where is the dimension of the underlying space.
In particular,  , where
, where  are called the polynomial coefficients. Thus, the solution to the characteristic equation abides by the following facts from polynomial functions:
are called the polynomial coefficients. Thus, the solution to the characteristic equation abides by the following facts from polynomial functions:
– Polynomial roots: A polynomial  has a root if
has a root if  divides , i.e.,
divides , i.e.,  such that
such that  .
.
– The fundamental theorem of Algebra states that a polynomial of degree has complex roots that are not necessarily distinct.
– The Complex Conjugate Root Theorem states that If is a complex root of a polynomial with real coefficients, then the conjugate  is also a complex root.
is also a complex root.
Therefore, the eigenvalues can either be real or complex numbers. If one eigenvalue is a real number, then there exists a vector with real valued components that is an eigenvector of the tensor. Otherwise, the only eigenvectors are complex eigenvectors which are elements of finite dimensional linear spaces over the field of complex numbers.
Graphical Representation of the Eigenvalues and Eigenvectors
The eigenvectors of a tensor are those vectors that do not change their direction upon transformation with the tensor but their length is rather magnified or reduced by a factor . Notice that an eigenvalue can be negative (i.e., the transformed vector can have an opposite direction). Additionally, an eigenvalue can have the value of 0. In that case, the eigenvector is an element of the kernel of the tensor.
The following example illustrates this concept. Choose four entries for the matrix  and press evaluate.
and press evaluate.
The tool then draws 8 coloured vectors across the circle and their respective images across the ellipse. Use visual inspection to identify which vectors keep their original direction.
The tool also finds at most two eigenvectors (if they exist) and draws them in black along with their opposite directions. Use the tool to investigate the eigenvalues and eigenvectors of the following matrices:
![\[ \left(\begin{array}{cc} 1& 0\\ 0&1\end{array}\right)\hspace{10mm}\left(\begin{array}{cc} 1& 1\\ 0&1\end{array}\right)\hspace{10mm}\left(\begin{array}{cc} 0.4& 0.7\\-0.7&0.2\end{array}\right) \hspace{10mm}\left(\begin{array}{cc} 1& 2\\5&1\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-fd431aff02b35aee01d7c04bd7e5adb4_l3.png "Rendered by QuickLaTeX.com")
After inspection, you should have noticed that every vector is an eigenvector for the identity matrix since  , i.e., possesses one eigenvalue which is
, i.e., possesses one eigenvalue which is  but all the vectors in are possible eigenvectors.
but all the vectors in are possible eigenvectors.
You should also have noticed that some matrices don’t have any real eigenvalues, i.e., none of the vectors keep their direction after transformation. This is the case for the matrix:
![\[ M=\left(\begin{array}{cc} 0.4& 0.7\\-0.7&0.2\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-56f93beb43636d048e9c04f1266beab5_l3.png "Rendered by QuickLaTeX.com")
Additionally, the matrix:
![\[ N=\left(\begin{array}{cc} 1& 1\\0&1\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-3a8e29822b32366f18c358b792e4a50c_l3.png "Rendered by QuickLaTeX.com")
has only one eigenvalue while any vector which is a multiplier of
![\[ p=\left(\begin{array}{cc} 1\\0\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-ce72bf7de50cfc952747430165f13135_l3.png "Rendered by QuickLaTeX.com")
keeps its direction after transformation through the matrix . You should also notice that some matrices will have negative eigenvalues. In that case, the corresponding eigenvector will be transformed into the direction opposite to its original direction. See for example, the matrix:
![\[ O=\left(\begin{array}{cc} 1& 2\\5&1\end{array}\right) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-a94018eb8d12b6cf5b20e4c7fcc549fe_l3.png "Rendered by QuickLaTeX.com")