
Approximate Methods: The Weighted Residuals Method
The statement of the equilibrium equations applied to a set  is as follows. Assuming that at equilibrium
is as follows. Assuming that at equilibrium  is the symmetric Cauchy stress distribution on
is the symmetric Cauchy stress distribution on  and that
and that  is the displacement vector distribution and knowing the relationship
is the displacement vector distribution and knowing the relationship  , then the equilibrium equation seeks to find
, then the equilibrium equation seeks to find  such that the associated
such that the associated  satisfies the equation:
satisfies the equation:
![\[ \mathrm{div}\sigma+\rho b= 0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e526576fab30481b2c1132610584b9ac_l3.png "Rendered by QuickLaTeX.com")
where  is the body forces vector distribution on ,
is the body forces vector distribution on ,  is the mass density, and
is the mass density, and  is the space of all possible displacement functions applied to , i.e.,
is the space of all possible displacement functions applied to , i.e.,  . The term “Kinematically admissible” in indicates that the space of possible solutions must satisfy the boundary conditions imposed on
. The term “Kinematically admissible” in indicates that the space of possible solutions must satisfy the boundary conditions imposed on  (as stated below) and any differentiability constraints.
(as stated below) and any differentiability constraints.
The boundary conditions for the equations of equilibrium are usually given on two parts of the boundary of denoted  . On the first part,
. On the first part,  , the external traction vectors
, the external traction vectors  are known so we have the boundary conditions for since
are known so we have the boundary conditions for since  (
( is the normal vector to the boundary). On the second part, , the displacement is given.
is the normal vector to the boundary). On the second part, , the displacement is given.
The weighted residuals method seeks an approximate solution  with a particular form that has a finite number of unknown parameters. Since does not necessarily satisfy the requirements for the problem, the corresponding stresses
with a particular form that has a finite number of unknown parameters. Since does not necessarily satisfy the requirements for the problem, the corresponding stresses  would not satisfy equilibrium. The residuals
would not satisfy equilibrium. The residuals  are defined as the resulting values when the approximate solutions are substituted in the differential equation:
are defined as the resulting values when the approximate solutions are substituted in the differential equation:
![\[ R=\mathrm{div}\sigma_{approx}+\rho b \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-3b6e26490b7eab55946f4311b5c814c7_l3.png "Rendered by QuickLaTeX.com")
If  is the number of unknown parameters in then weight functions
is the number of unknown parameters in then weight functions  can be chosen. For each
can be chosen. For each  , an integral form of the residuals is set to zero:
, an integral form of the residuals is set to zero:
(1) 
The form of should be chosen satisfying the essential boundary conditions while the non-essential boundary conditions can be imposed in a variety of ways. There are two ways that the non-essential boundary conditions can be imposed. In the first one, if  is the imposed boundary conditions on the boundary , then, the residual
is the imposed boundary conditions on the boundary , then, the residual  is first defined and the boundary condition is incorporated by setting
is first defined and the boundary condition is incorporated by setting
![\[ \int_{\partial D_n} \! R_nW_i \,\mathrm{d}s=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-c2edde3bd3a0b6ee844d5df54b102002_l3.png "Rendered by QuickLaTeX.com")
Alternatively, the non-essential boundary conditions are incorporated directly in Equation 1 using integration by parts as will be shown later.
The Weighted Residuals Methods
Assuming  , where
, where  is a known function and
is a known function and  is an unknown parameters, the weighted residuals methods vary in the choice of the weight functions . The following is a list of possible choices for :
is an unknown parameters, the weighted residuals methods vary in the choice of the weight functions . The following is a list of possible choices for :
Least Squares Method
In the least squares method, the weight functions is chosen such that
![\[ W_i=\frac{\partial R}{\partial a_i} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e6a8bc08ee25043bc86ca09443b20e61_l3.png "Rendered by QuickLaTeX.com")
The least squares method is effectively minimizing the squares of the residuals:
![\[ I=\int_{D} \! R^2 \,\mathrm{d}x=\mbox{minimum} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-12b5f65e46b95f5e84e5436ead505ba7_l3.png "Rendered by QuickLaTeX.com")
Point Collocation Method
The Point Collocation Method described before is a special case where points are chosen such that  and the weight functions are chosen such that
and the weight functions are chosen such that  :
:
![\[ W_i=\delta_{x_i}=\bigg\{ \begin{matrix}1 & x=x_i\\ 0 & \mbox{otherwise} \end{matrix} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-7e3328a6fa694e8411af4a93d0019a9d_l3.png "Rendered by QuickLaTeX.com")
Sub-domain Method
In this method, sub-domains are chosen such that  and the weight functions are chosen such that :
and the weight functions are chosen such that :
![\[ W_i=\mathcal{X}_{D_i}=\bigg\{ \begin{matrix}1 & x\in D_i\\ 0 & \mbox{otherwise} \end{matrix} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e806a919a113d7c3dd91e90f43f95c4f_l3.png "Rendered by QuickLaTeX.com")
Galerkin Method
In the Galerkin method, the weight functions is chosen such that
![\[ W_i=\phi_i(x) \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-16510d7c7435c913e917fecb52a7cbda_l3.png "Rendered by QuickLaTeX.com")
The Galerkin method is effectively the virtual work method.
Example
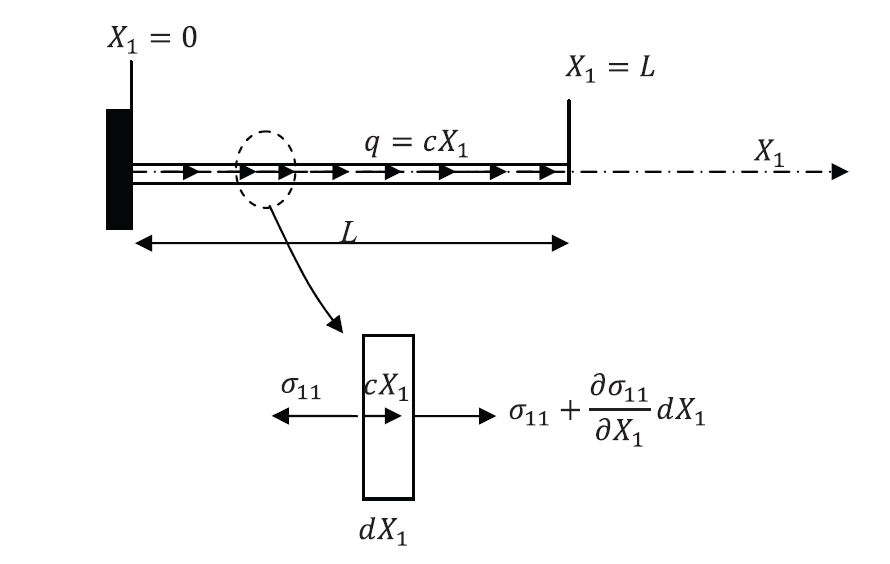
Using a polynomial trial function of the third degree, find the displacement function of the shown bar using the Galerkin method. Assume that the bar is linear elastic with Young’s modulus E and cross-sectional area A and that the small strain tensor is the appropriate measure of strain. Ignore the effect of Poisson’s ratio.
Solution
Exact Solution
The exact solution can be obtained by directly solving the differential equation of equilibrium utilizing  :
:
![\[ \frac{\mathrm{d}^2u_1}{\mathrm{d}X_1^2}=-\frac{cX_1}{EA} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e217ce8a05948eb7cad9ddbffe0fd596_l3.png "Rendered by QuickLaTeX.com")
with the boundary conditions:  and
and  .
.
Therefore:
![\[ u_1=\frac{cL^2}{2EA}X_1-\frac{c}{6EA}X_1^3 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-04850a8347c5fc3568692561add41bf3_l3.png "Rendered by QuickLaTeX.com")
DSolve[{u''[X1] == -c*X1/EA, u'[L] == 0, u[0] == 0}, u[X1], X1]
Approximation Solution
The approximate solution has the form:
![\[ u_{approx}=a_0+a_1X_1+a_2X_1^2+a_3X_1^3 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-7f7962616a945c3ce442eb459cdfc531_l3.png "Rendered by QuickLaTeX.com")
There is one essential boundary condition which is  , therefore,
, therefore,  .
.
The approximate solution thus has the following form which satisfies the essential boundary conditions:
![\[ u_{approx}=a_1X_1+a_2X_1^2+a_3X_1^3 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-58adf5afbe83fc43c9fc035cabfbfe6d_l3.png "Rendered by QuickLaTeX.com")
where  ,
,  , and
, and  are the known functions and
are the known functions and  ,
,  , and
, and  are the unknown parameters. The residuals have the form:
are the unknown parameters. The residuals have the form:
![\[ R=\frac{\mathrm{d}^2u_{approx}}{\mathrm{d}X_1^2}+\frac{cX_1}{EA} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-8b3fdd8e0b2813af6346f034cce5ec35_l3.png "Rendered by QuickLaTeX.com")
The Galerkin method aims at setting the weighted residuals to zero:
![\[ \int_{D} \! RW_i \,\mathrm{d}x= \int_{D} \! \left(\frac{\mathrm{d}^2u_{approx}}{\mathrm{d}X_1^2}+\frac{cX_1}{EA}\right)W_i \,\mathrm{d}x=0 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-4bca49be3d35b0a750bc4a787d1e0a0f_l3.png "Rendered by QuickLaTeX.com")
Rearranging:
![\[ \int_0^L \! W_i\left(\frac{\mathrm{d}^2u_{approx}}{\mathrm{d}X_1^2}\right) \,\mathrm{d}X_1=\int_0^L \! -W_i\left(\frac{cX_1}{EA}\right) \,\mathrm{d}X_1 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-e284bef05956e1086fd12edd3b9f0fb3_l3.png "Rendered by QuickLaTeX.com")
Integration by parts of the left hand side can be used to incorporate the nonessential boundary conditions  as follows:
as follows:
![\[\begin{split} \int_0^L \! W_i\left(\frac{\mathrm{d}^2u_{approx}}{\mathrm{d}X_1^2}\right) \,\mathrm{d}X_1 & =W_i\left(\frac{\mathrm{d}u_{approx}}{\mathrm{d}X_1}\right)\bigg|_{X_1=0}^{X_1=L}-\int_0^L \! \frac{\mathrm{d}W_i}{\mathrm{d}X_1}\left(\frac{\mathrm{d}u_{approx}}{\mathrm{d}X_1}\right) \,\mathrm{d}X_1\\ &=0-\int_0^L \! \frac{\mathrm{d}W_i}{\mathrm{d}X_1}\left(\frac{\mathrm{d}u_{approx}}{\mathrm{d}X_1}\right) \,\mathrm{d}X_1 \end{split} \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-30bf778b22b42455506e80d438733aa3_l3.png "Rendered by QuickLaTeX.com")
Therefore, the Galerkin method equations now have the form:
![\[ \int_0^L \! \frac{\mathrm{d}W_i}{\mathrm{d}X_1}\left(\frac{\mathrm{d}u_{approx}}{\mathrm{d}X_1}\right) \,\mathrm{d}X_1=\int_0^L \! W_i\left(\frac{cX_1}{EA}\right) \,\mathrm{d}X_1 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-727f718e46f45951c26128af08b0e872_l3.png "Rendered by QuickLaTeX.com")
To find the unknowns , , and , three equations are formed with  ,
,  , and
, and  . Solving those three equations the following approximate solution is obtained:
. Solving those three equations the following approximate solution is obtained:
![\[ u_{approx}=\frac{cL^2}{2EA}X_1-\frac{c}{6EA}X_1^3 \]](https://engcourses-uofa.ca/wp-content/ql-cache/quicklatex.com-bc15831d4fe7a75a814fde470299a81e_l3.png "Rendered by QuickLaTeX.com")
Notice that since the exact solution (a polynomial of the third degree) is an element of the space of possible approximate solutions, the Galerkin method yields the exact solution!
View Mathematica Code
w1=x1;
w2=x1^2;
w3=x1^3;
u=a1*w1+a2*w2+a3*w3;
Eq1=Integrate[D[w1,x1]*D[u,x1],{x1,0,L}]-Integrate[w1*c*x1/EA,{x1,0,L}];
Eq2=Integrate[D[w2,x1]*D[u,x1],{x1,0,L}]-Integrate[w2*c*x1/EA,{x1,0,L}];
Eq3=Integrate[D[w3,x1]*D[u,x1],{x1,0,L}]-Integrate[w3*c*x1/EA,{x1,0,L}];
s=Solve[{Eq1==0,Eq2==0,Eq3==},{a1,a2,a3}]
u/.s[[1]]
Problems
Solve the problems in the Rayleigh Ritz method section using the Galerkin Method.